




Prof. Ahmed Radwan
Professor
Faculty Office Ext.
1758
Faculty Building
UB2
Office Number
S21
Prof. Ahmed G. Radwan (SMIEEE, Fellow-AAS) is the Vice-President for Research, and Dean of Graduate Studies at Nile University, Egypt. He is the Founder and general co-Chair of NILES International Conference, and also the Founder and Chair of the Undergraduate Research Forum (UGRF) at Nile University. He has a total number of indexed publications of 475+, more than 11,000 citations and h-index: 55 according to Scopus.
He is a Co-inventor of 6 US patents, author/co-author of 12 international books as well as 18 book chapters in the highly ranked publishers. Prof. Radwan is leading the fractional-order circuits track worldwide. He is an associate editor in 4 prestigious Scopus-indexed journals and TC member in IEEE CASS. Some of his prestigious Awards: The State Encouragement Award, The State Excellence Award, Abdul Hameed Shoman Award, Scopus Award in Engineering and Technology, Prof. Tarek Khalil Award 2022 for Distinguished Leadership from Nile university and many more. He managed funded projects with budgets over 10M EGP and supervised more than 50 (Master's & Ph.Ds.).
1) Fractional-Order Systems
2) Memristor
3) Bifurcation
4) Encryption
5) Chaos

Wireless Monitoring of Fruit Growth Using an Electrical BioImpedance Sensor Device
Software Algorithm and Hardware Implementations of Information Security Using Number Theory and Chaotic Systems

FPGA/FPAA Implementation of Fractional-order Systems
Ternary Logic Gates Design

Two Port Fractional-order Oscillators and Filters Suitable for Tissue Modeling

Development and Manufacturing of Soft Actuated Under Water Robotics
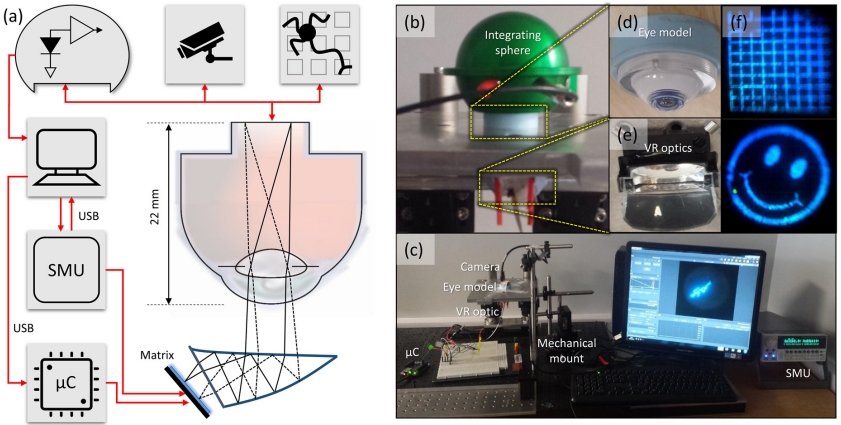
Fractional order Image Processing Platform for Retinal Pigmontosa Patients
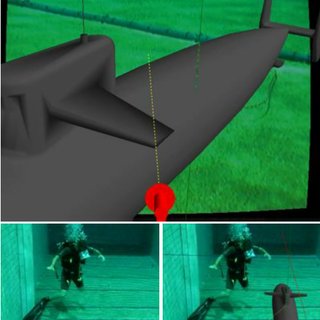
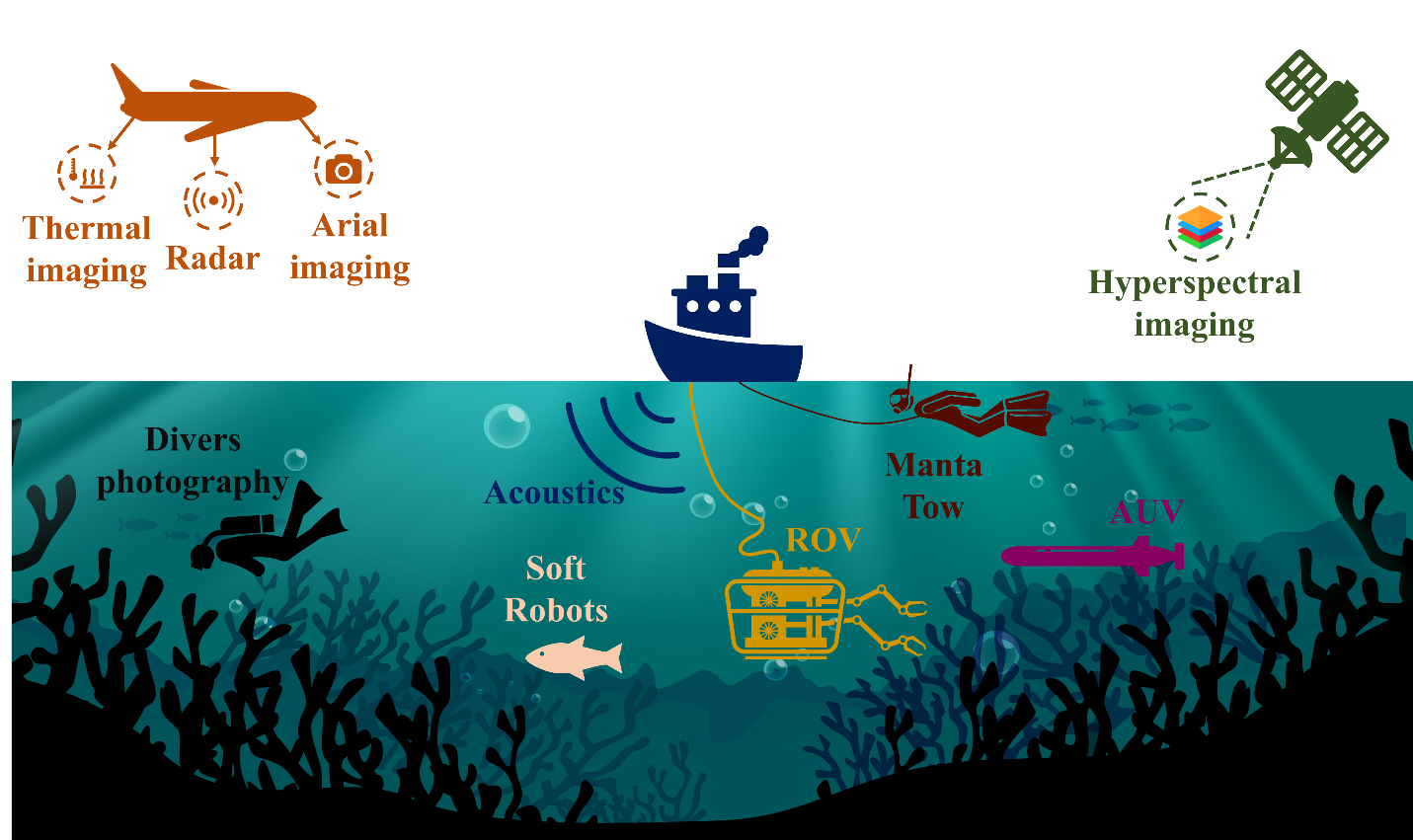
An Underwater AR based System for Marine Life Detection and Classification for Divers and Tourists

Multi-stage Low-cost Treatment of Dyes and Paints Wastewater by Coagulation, Adsorption, and Filtration for Reuse in Several Application
Bio-Mimetic Locomotion of Soft Turtle Robot