


Bio-inspired Soft Robot for Monitoring Coral Reefs
Abstract
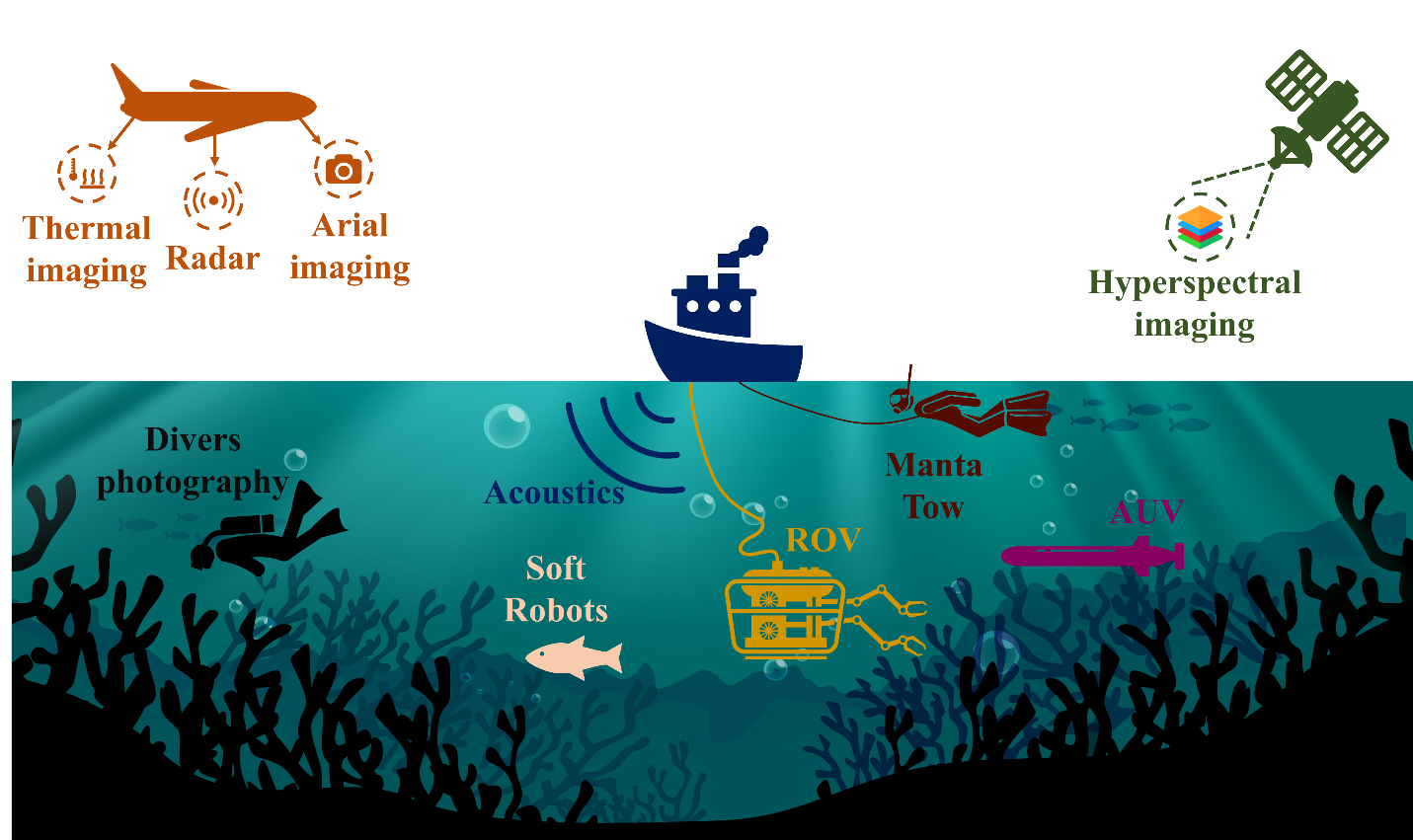
Coral reefs play a crucial role in supporting a quarter of all aquatic life, but their existence is now threatened by ongoing climate changes. Our project aims to develop an underwater soft robot that can mimic the morphology and shape of actual marine creatures and to imitate their swimming motion. This robot can play a critical role as monitoring platform to understand the reefs environment more without doing much disturbance in such delicate environment.
Fund
ASRT
Prototypes
1) A prototype of hybrid robot fish using a thin piece of PlA material as the fish tail driven by a servo motor to generate the tail's undulating motion required to generate thrust.
2) A soft fludic tail consists of two soft actuators embedded inside an outer shell in the shape of a fishtail. Each actuator consists of a series of pillows empty pillows between the two actuators there is a passive layer separating the effect of each actuation, When fluid is pressurised into one actuator the pillows will inflate and by alternating the pressure between the two actuators cause the oscillatory motion.
Soft Robotics Project: Eggplant

Soft Robotics Project: Silicone Tail

Soft Robotics Project: Turtle Circ
Soft Robotics Project: Orange 127 g

Soft Robotics Project: Hyprid Tail
Soft Robotics Project: Apple 175 g

Soft Robotics Project: Hybrid Fish Low Freq

Soft Robotics Project: Hybrid Fish Bouyancy
