Image

Research Project
Development and Manufacturing of Soft Actuated Under Water Robotics
Objective/Contributions:
- Surveying research papers about transferring hard robot characteristics to soft one.
- Use additive manufacturing techniques to minimize the assembly process of the ROV actuator.
- Work on soft control and soft sensing system and study its ability to be used in soft robotics.
- Discuss biomimicking ROV.
- Create a hub for soft robotics at Nile University for participating in Egypt's future vision (2030) or technology transfer.
- Design a functional prototype of a completely Soft Under Water ROV (SUWR).
Outcomes:
- Surveying research papers about transferring hard robot characteristics to a soft one: The survey was done on 3 stages, the first one was done on soft robotics technology, the second on the biomimetic and underwater robots, and the third one is on the soft underwater robot manufacture and simulation. The first literature survey was published in IEEE Access (Impact Factor: 3.75, Cite Score: 4.0), DOI: 10.1109/ACCESS.2020.3030098.
- Use additive manufacturing techniques to minimize the assembly process of ROV actuator:
- Four prototypes were used to investigate different types of manufacturing, materials, and driving methods, to obtain the best solution for underwater soft robot manufacturing.
- Use molding processing on the prototype and use FDM or DLP for 3D printing to distinguish the advantages and disadvantages of these manufacturing methods.
- Also, two types of material were used (Silicone rubber for molding and TPU for 3D printer) to test the most suitable material for the actuator deflection and to get the best motion.
- The materials were tested by changing the driving methods of hydraulic, pneumatic, and servo motors for further research.
- Work on tactile sensing and study its ability to be used in soft robotics. Study the effect of biological tissue impedance change of aloe vera integrated in soft skin against the change of force. This work was published in Journal Article in Nature Scientific Reports (Impact Factor: 3.998, Cite Score: 7.2) “Tactile sensing biohybrid soft E-skin based on bioimpedance using aloe vera pulp tissues.” (DOI: - https://www.nature.com/articles/s41598-021-82549-x )
- Work on bio-mimicking for the on-ground turtle as a future leading to develop underwater soft robot turtle. The soft turtle was actuated by variable-oriented (3D) soft pneumatic actuators. Its motion behavior was modeled using Echo State network (Morphological Modelling). This work was published in Journal Article in Nature Scientific Reports (Impact Factor: 3.998, Cite Score: 7.2) “Modelling and implementation for the soft bio-mimetic turtle using echo state network and soft pneumatic actuators”. (DOI:- https://www.nature.com/articles/s41598-021-91136-z )
- Work on mathematical modelling of soft pneumatic actuator SPA behavior. Using mathematical and neural network modelling to model SPA work envelope and tip gripping force behavior. These works have been published in as journal paper in Elsevier: Sensors and Actuators Physical B, IF 3.407 “Theoretical and experimental investigation study of data-driven work envelope modelling for 3D printed soft pneumatic actuators” https://doi.org/10.1016/j.sna.2021.112978. Another paper in IEEE Niles-2020 Conference “Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator” DOI: 10.1109/NILES50944.2020.9257964.
- Discuss biomimicking ROV and design a functional prototype of a completely Soft Under Water ROV (SUWR):
- Inspired by fishtail fins, two designs were studied to mimic the swimming movement of fish. First, the completely soft tuna tail is made of silicone rubber. The tail design was simulated through finite element analysis and computational fluid dynamics. The prototype was manufactured and tested to use a hydraulic drive method to generate a tail frequency that moves the fish forward.
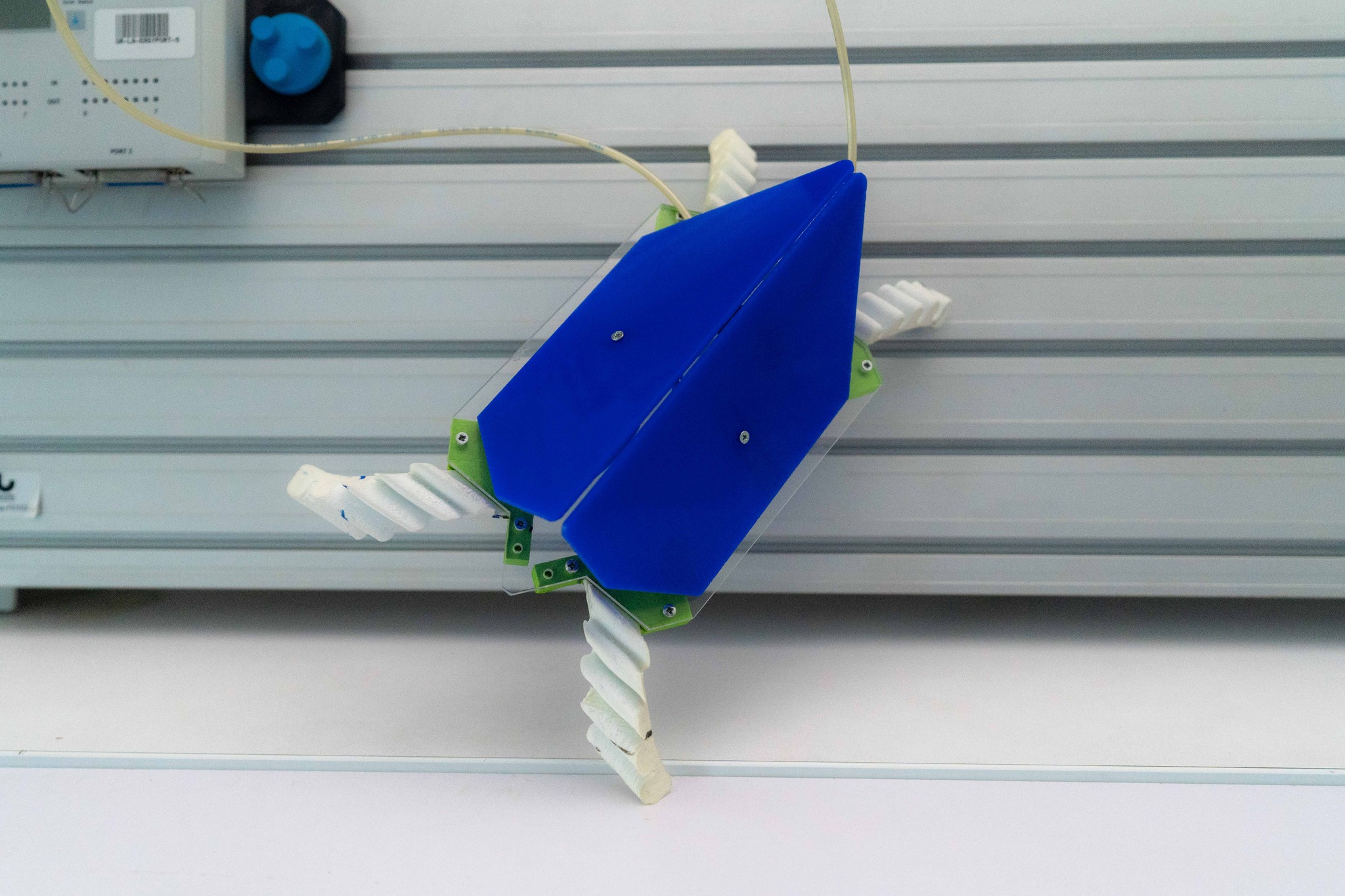
- Second, a semi-soft tail is fabricated using 3D printing (Fused Deposition Modeling FDM technology). Turtles are widely recognized as an important part of coral reef health and resilience, mediating the competition for Benthic space between algae and reef-building corals.
- Turtles, when present in sufficient numbers, can keep algal communities cropped, preventing the spread and expansion of macroalgal communities. Based on this fact, two prototypes were inspired by the movement of the tortoise. The first prototype was on land and the second prototype was underwater.
- For the first time in Egypt, utilize the usage of Selective Laser Sintering (SLS) 3D printing technology to develop high-end prototypes for Soft Robotics Research. The printer used is Sinterit Lisa Pro printer which is a European standard 3D printer with exceptional capabilities. Besides that, high-tech image processing system will be installed to be utilized for modelling and smart control systems “OPTI Track System”.
- Create a hub for soft robotics at Nile University for participating in Egypt's future vision (2030) or technology transfer. Perform a general workshop on soft robot at Nile university through the workshop a group of an undergraduate junior research assistants is established. The group help in the design and fabrication of the sea turtle prototype.
- The Researchers in this project would like to complete their three master theses in Mechatronic and Microelectronics System Design related to the challenges in modelling, control, sensing and manufacturing of soft robotics. There are three master theses finished through the project period and another one in the process.
- Work on a review from the beginning of the project to survey the field of underwater soft robotics and its current advances and trends. The objective of this review is to highlight the key challenges and the potential of soft robotics, and more specifically for the purpose of bio-mimicking marine creatures to perform underwater applications. The work has been published as a journal paper in MDPI Micromachines journal as part of a special issue entitled “Soft Robotics: Design, Fabrication, Modeling, Control and Application” IF 2.891. The paper title is “Underwater Soft Robotics: A Review of Bioinspiration in Design, Actuation, Modeling, and Control” DOI: https://doi.org/10.3390/mi13010110