


Circuit Theory and Applications
Study on the microstructure, mechanical and corrosion behaviors of 2A12 Al matrix composites containing B4C and 50% K2TiF6 flux
This study presents an innovative exploration into the development and characterization of boron carbide (B4C) reinforced aluminum (Al) metal matrix composites (AMMCs), specifically focusing on the 2A12 Al alloy. Utilizing a cutting-edge vacuum induction melting process, the research investigates the effects of varying B4C particle concentrations in conjunction with 50% K2TiF6 flux additions. This novel approach aims to enhance the microstructural integrity, mechanical properties, and corrosion resistance of the AMMCs. The research unveils a significant improvement in microhardness and tensile
Influence of high-strain-rate compression and subsequent heat treatment on (TiNbZr)89(AlTa)11 refractory high-entropy alloys: Dynamic-mechanical behavior and microstructural changes
This study explored the dynamic-mechanical behavior of a novel low-density (TiNbZr)89(AlTa)11 refractory high-entropy alloy (RHEA) across strain rates ranging from 1.0 × 103 to 3.5 × 103 s−1. A significant increase in the yield and ultimate compressive strengths with rising strain rates up to 3.0 × 103 s−1 was observed and attributed to enhanced dislocation activities and stress-induced microstructural transformations. The formation of the B2 phase and Zr5Al3 precipitates was found to be crucial in bolstering the alloy strength at high strain rates. Beyond strain rates of 3.0 × 103 s−1, a
Fractional-order fuzzy sliding mode control of uncertain nonlinear MIMO systems using fractional-order reinforcement learning
This paper introduces a novel approach aimed at enhancing the control performance of a specific class of unknown multiple-input and multiple-output nonlinear systems. The proposed method involves the utilization of a fractional-order fuzzy sliding mode controller, which is implemented through online fractional-order reinforcement learning (FOFSMC-FRL). First, the proposed approach leverages two Takagi–Sugeno–Kang (TSK) fuzzy neural network actors. These actors approximate both the equivalent and switch control parts of the sliding mode control. Additionally, a critic TSK fuzzy neural network
Constitutive equation for compressible non-isothermal polymeric fluids: A microstructural approach
This contribution presents a microstructural approach to relax both the incompressibility and the isothermality constraints in the elastic-dumbbell model. This results in a compressible version for the Smoluchowski equation which is used to derive a non-isothermal compressible evolution equation for the conformation tensor for a general spring force. The devised general equation is used to derive constitutive equations depending on spring force model whether linear or non-linear. A moving-grid numerical scheme is developed to test the ability of the proposed model in capturing experimental
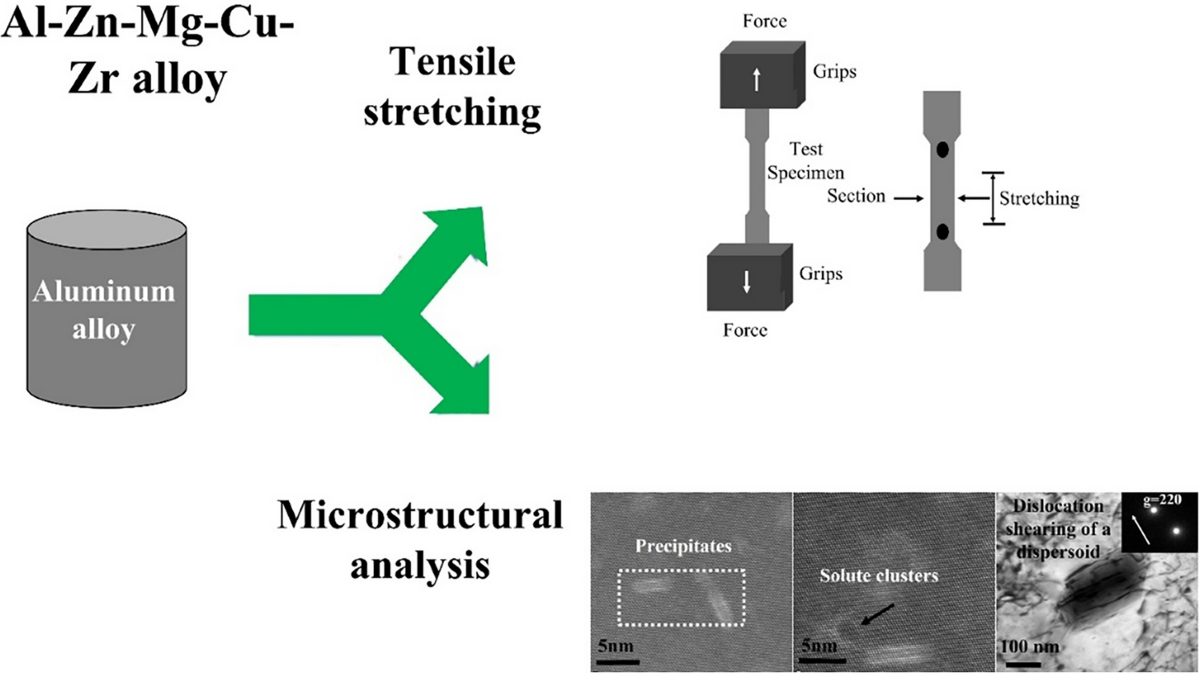
Investigating the Microstructural Impact of Tensile Stretching on Al-Zn-Mg-Cu Alloys: Dislocation-Precipitate Interactions
The study investigates the effects of tensile stretching on the microstructural evolution and mechanical properties of a high Zn-content Al-Zn-Mg-Cu alloy, emphasizing dislocation dynamics and precipitate behavior. The alloy, with a composition of Al-9.01 Zn-2.45 Cu-2.25 Mg-0.13 Zr (wt.%), prepared through casting subjected to peak-aged (T6) at 743 K for 1 h followed by 393 K for 24 h. Tensile stretching at room temperature (~ 298 K) and a strain rate of 1.0 × 10−3 s−1 resulted in a 20% increase in yield strength from to 300 to ~ 360 MPa, with ductility decreasing to ~ 1% elongation to
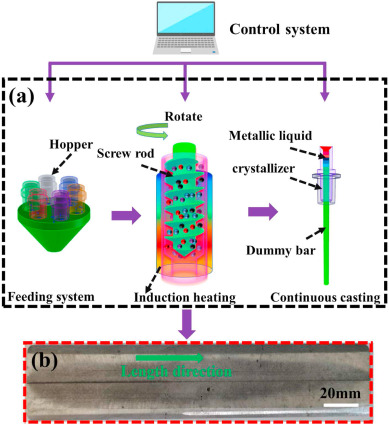
Investigation on microstructures, mechanical properties, and corrosion behavior of novel biodegradable Zn-xCu-xTi alloys after hot rolling fabricated by self-developed newly gradient continuous casting
The poor mechanical properties exhibited by pure Zn effectively prohibit its utilization as a viable material for biodegradable implants. Hence, the primary area of interest has been directed towards alloy design and process strategies of biodegradable Zn alloys. To this end, novel biodegradable Zn-xCu-xTi (Cu: x = 0.001–2.72 and Ti: x = 0.03–1.21) alloys were designed and fabricated using a gradient continuous casting method followed by homogenization and rolling. The fabricated samples were then investigated in terms of their microstructures, mechanical properties, and corrosion behavior
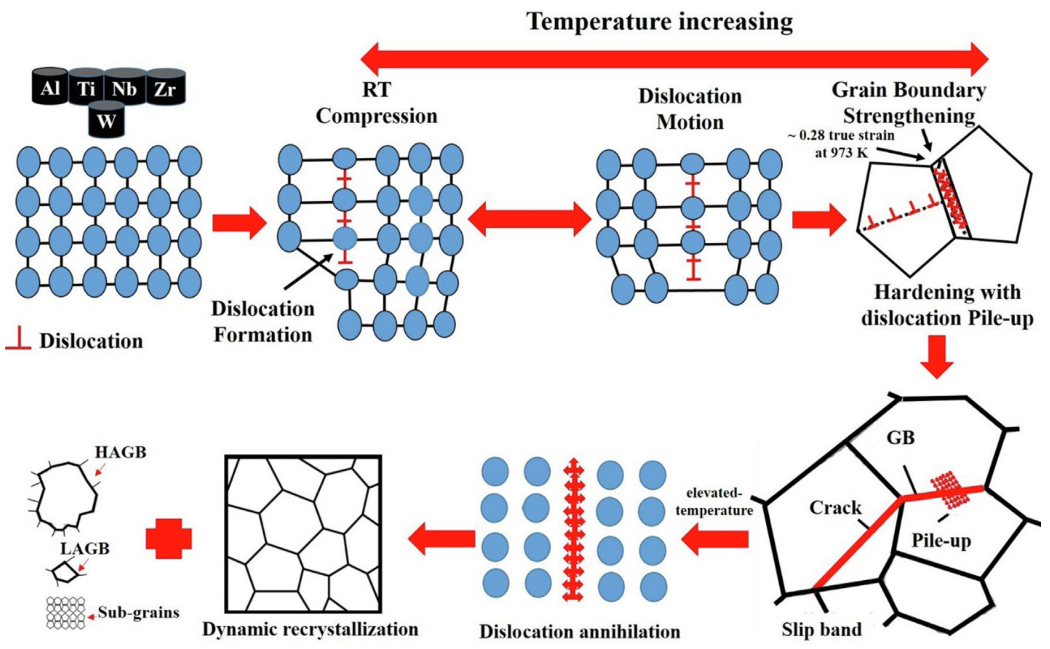
A superb mechanical behavior of newly developed lightweight and ductile Al0.5Ti2Nb1Zr1Wx refractory high entropy alloy via nano-precipitates and dislocations induced-deformation
The lightweight refractory high entropy alloys (RHEAs) can be considered the best alternative to Ni-based superalloys, which has significantly increased the attention of researchers. In this study, the newly designed lightweight (ρ ∼ 6.2 g/cm3) Al0.5Ti2Nb1Zr1WX (X: 0, 0.3, 0.5, 0.7) RHEAs were prepared. Our results evidence that the microstructure of Al0.5Ti2Nb1Zr1W0.5 RHEA has a BCC structure merged with B2 nano-precipitates, which leads to significant improvement in the specific yield strength (SYS) compared with other RHEAs. Besides, the compressive SYS (σ0.2/ρ) of Al0.5Ti2Nb1Zr1W0.5 RHEA
Thermal optimization of square pin-fins in crossflow using the Lattice Boltzmann Method with quadratic thermal equilibrium
The geometric spacing and operating Reynolds number (Re) for the best thermal performance of square pin-fin heat sinks is found numerically at a Prandtl number of 0.7. The numerical model used is the double population thermal Multiple-Relaxation-Time Lattice Boltzmann Method (MRT LBM). The Nusselt number (Nu), friction factor (f) and the Thermal Performance Factor (TPF) are calculated for a range of streamwise (0.5 to 3) and cross-streamwise (1 to 2) spacing ratios at Re numbers from 20 to 140. A quadratic thermal equilibrium distribution function is used instead of the commonly used linear
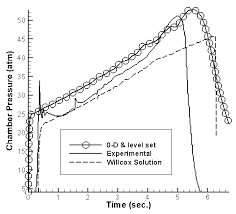
Solid rocket motor interior ballistics fluid-solid interaction simulation using level set method for 2D grains
The flow inside a solid rocket motor is considered taking into account the fluid-solid interaction between the combustion gases and the burning grain surface. An unsteady flow model is presented for the flow variables while the time-dependent burning surface is captured using the level set method. Then, a hybrid model is presented by coupling the flow model with the interface capturing technique. The proposed hybrid model is successfully tested against previously published experimental and numerical data. The use of the level set method enables the flow model to consider complex grain shapes
Exact Nonlinear Spectral Analysis of Nonsmooth WENO-JS Solutions
The fifth-order accurate Weighted Essentially Nonoscillatory space discretization developed by Jiang and Shu (WENO-JS) is studied theoretically. An exact Nonlinear Spectral Method (NSM) is developed based on an innovative yet simple methodology. The NSM explains the behaviour of nonsmooth solutions because it is valid for arbitrary modified wave numbers (MWN). The NSM clarifies the effects of the time integration methods and the Courant number. The mode isolation assumption, extensively used to analyse WENO-JS, is elucidated, and several novel findings are presented. The improved performance