


Software and Communications
Natural products and long noncoding RNA signatures in gallbladder cancer: a review focuses on pathogenesis, diagnosis, and drug resistance
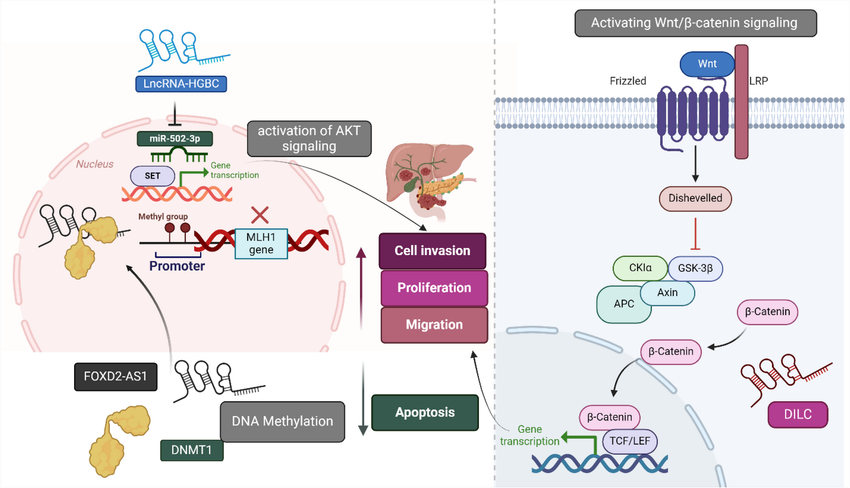
Gallbladder cancer (GBC) is an aggressive and lethal malignancy with a poor prognosis. Long noncoding RNAs (lncRNAs) and natural products have emerged as key orchestrators of cancer pathogenesis through widespread dysregulation across GBC transcriptomes. Functional studies have revealed that lncRNAs interact with oncoproteins and tumor suppressors to control proliferation, invasion, metastasis, angiogenesis, stemness, and drug resistance. Curcumin, baicalein, oleanolic acid, shikonin, oxymatrine, arctigenin, liensinine, fangchinoline, and dioscin are a few examples of natural compounds that
Design of Higher-Order Fractional Filters With Fully Controllable Frequency Characteristics
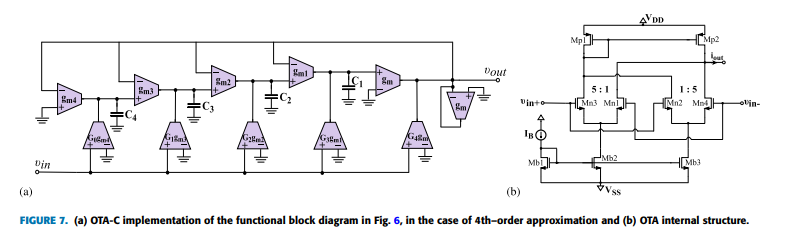
Higher-order fractional filters with fully controllable frequency characteristics are realized in this work, after fitting the filter's magnitude response data using a minimum-phase state-space model. Subsequently, rational integer-order transfer functions are derived and implemented using as active elements: a) Operational Transconductance Amplifiers (OTAs) and b) a Field Programmable Analog Array (FPAA) device. The realized filters enjoy electronic adjustability of their type, order, and characteristic frequencies while being easily validated on the digitally programmable FPAA platform. ©
A Reliable Secure Architecture for Remote Wireless Controlling of Vehicle's Internal Systems based on Internet of Vehicles using RF and Wi-Fi
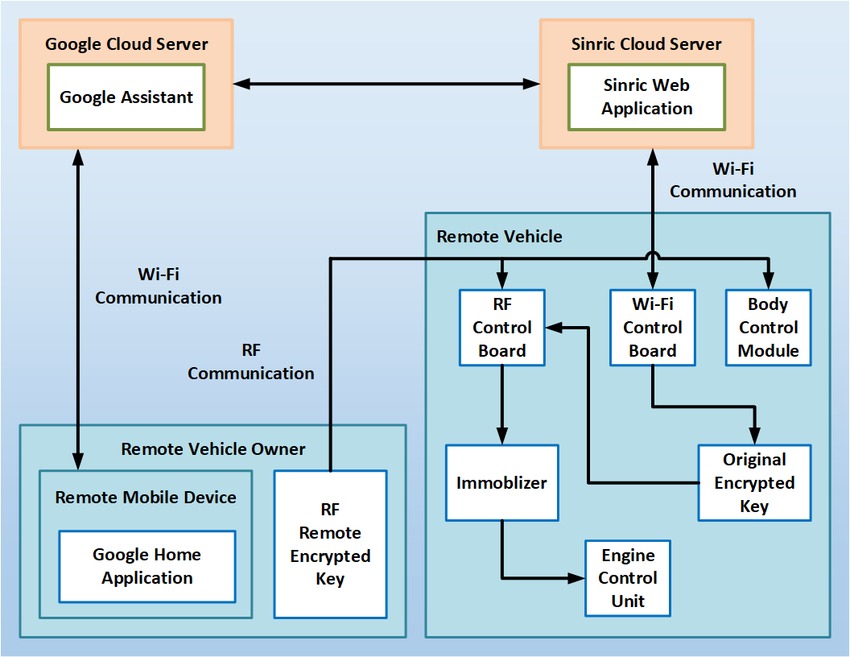
Internet of Vehicles is considered one of the most unprecedented outputs of the Internet of Things. No one has realized or even expected the rapidly-growing revolution regarding autonomous connected vehicles. Nowadays, Internet of Vehicles is massively progressing from Vehicular Ad-Hoc Networks as a huge futuristic research and development discipline. This paper proposes a novel reliable and secure architecture for ubiquitously controlling remote connected cars' internal systems, such as engine, doors' locks, sunroof, horn, windows' and lights' control systems. The main contribution is that
Sentiment Analysis On Arabic Companies Reviews
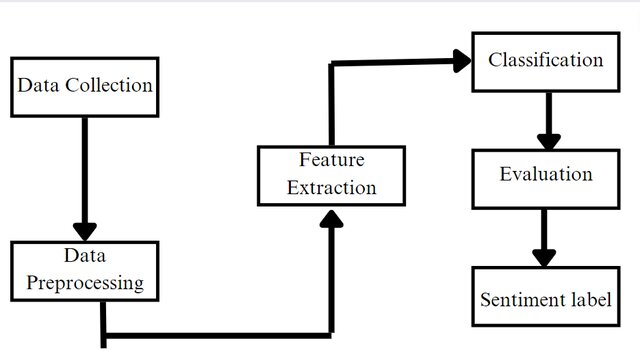
This study introduces an innovative approach to sentiment analysis, specifically tailored for the Arabic language, a domain that poses unique challenges due to its complex morphology and diverse dialects. Utilizing a substantial dataset of over 108,000 reviews related to Arabic companies, our primary objective was to develop a robust and reliable sentiment scoring system that caters to the intricacies of the Arabic language, aimed at assisting businesses in understanding customer sentiments more effectively.Our methodology encompassed an extensive preprocessing phase, crucial for preparing the
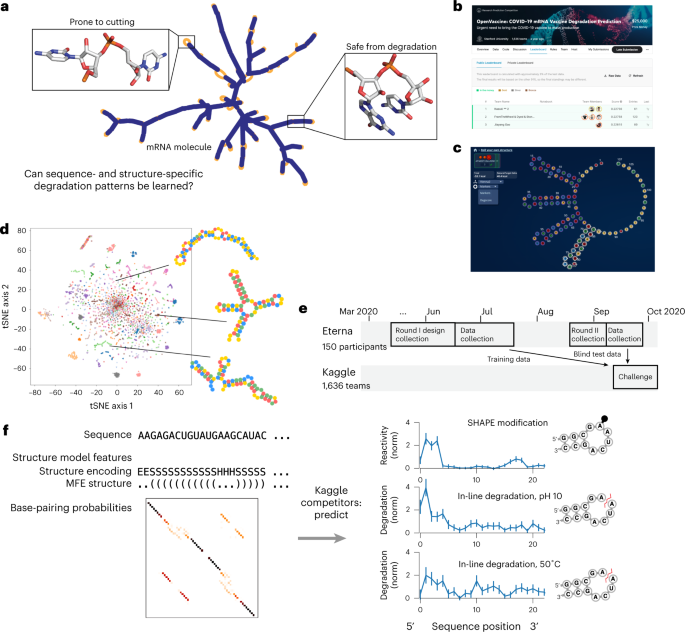
Deep learning models for predicting RNA degradation via dual crowdsourcing
Medicines based on messenger RNA (mRNA) hold immense potential, as evidenced by their rapid deployment as COVID-19 vaccines. However, worldwide distribution of mRNA molecules has been limited by their thermostability, which is fundamentally limited by the intrinsic instability of RNA molecules to a chemical degradation reaction called in-line hydrolysis. Predicting the degradation of an RNA molecule is a key task in designing more stable RNA-based therapeutics. Here, we describe a crowdsourced machine learning competition (‘Stanford OpenVaccine’) on Kaggle, involving single-nucleotide
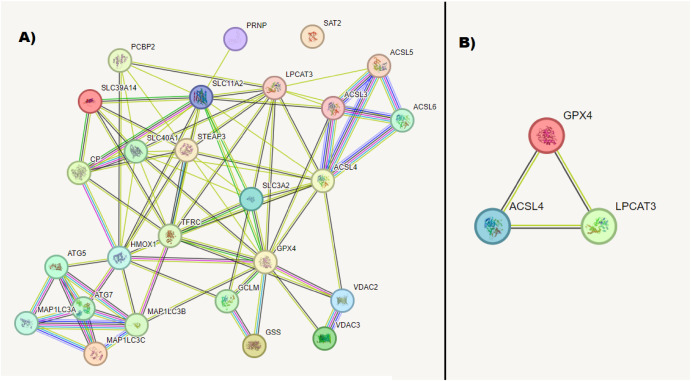
Innovative approaches to metabolic dysfunction-associated steatohepatitis diagnosis and stratification
The global rise in Metabolic dysfunction-associated steatotic liver disease (MASLD)/Metabolic dysfunction-associated steatohepatitis (MASH) highlights the urgent necessity for noninvasive biomarkers to detect these conditions early. To address this, we endeavored to construct a diagnostic model for MASLD/MASH using a combination of bioinformatics, molecular/biochemical data, and machine learning techniques. Initially, bioinformatics analysis was employed to identify RNA molecules associated with MASLD/MASH pathogenesis and enriched in ferroptosis and exophagy. This analysis unveiled specific

Vehicle to Pedestrian Systems: Survey, Challenges and Recent Trends
The accelerated rise of new technologies has reshaped the manufacturing industry of contemporary vehicles. Numerous technologies and applications have completely revolutionized the driving experience in terms of both safety and convenience. Although vehicles are now connected and equipped with a multitude of sensors and radars for collision avoidance, millions of people suffer serious accidents on the road, and unfortunately, the death rate is still on the rise. Collisions are still a dire reality for vehicles and pedestrians alike, which is why the improvement of collision prevention
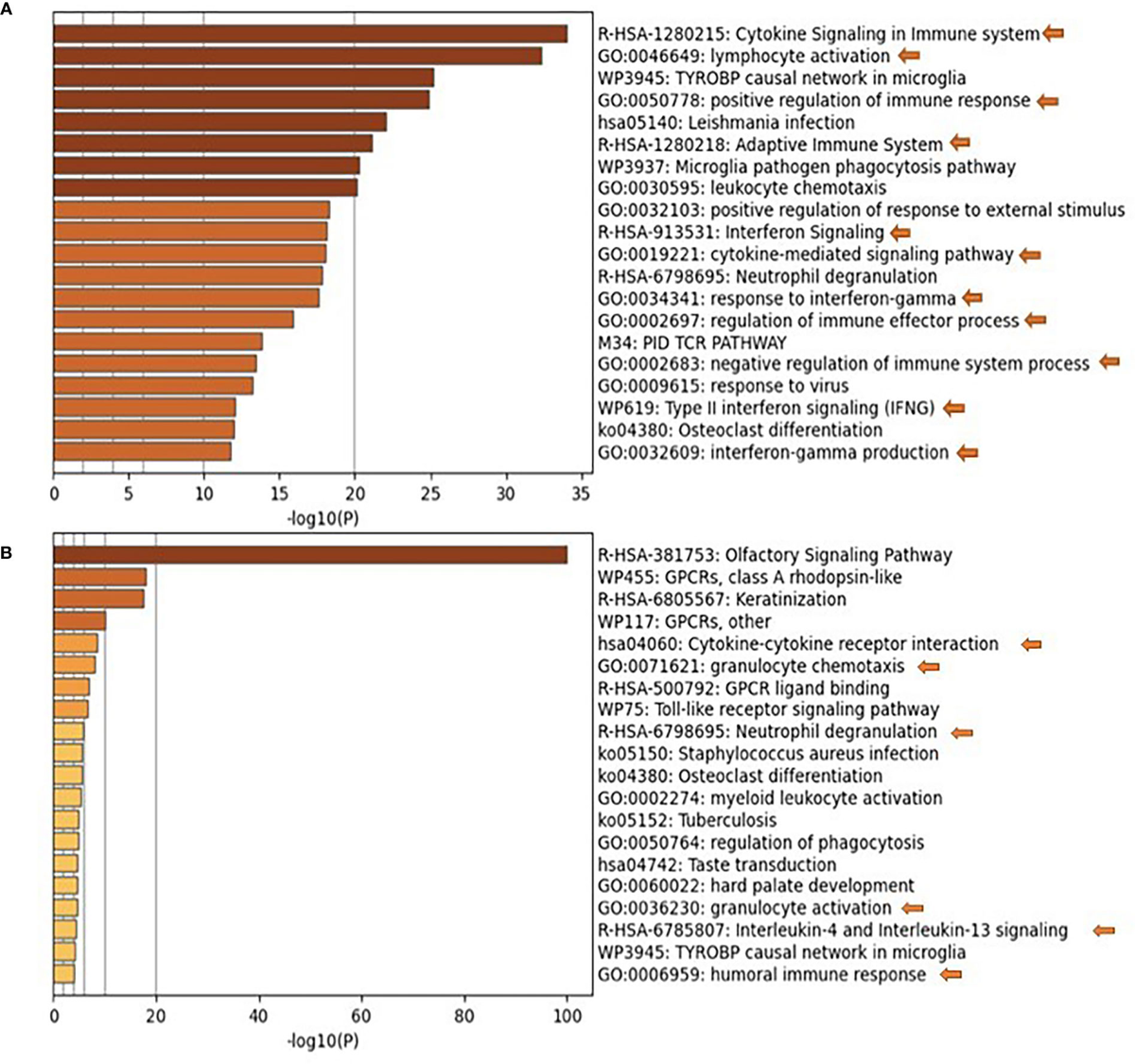
Identifying Immunological and Clinical Predictors of COVID-19 Severity and Sequelae by Mathematical Modeling
Since its emergence as a pandemic in March 2020, coronavirus disease (COVID-19) outcome has been explored via several predictive models, using specific clinical or biochemical parameters. In the current study, we developed an integrative non-linear predictive model of COVID-19 outcome, using clinical, biochemical, immunological, and radiological data of patients with different disease severities. Initially, the immunological signature of the disease was investigated through transcriptomics analysis of nasopharyngeal swab samples of patients with different COVID-19 severity versus control

A feature selection-based framework to identify biomarkers for cancer diagnosis: A focus on lung adenocarcinoma
Lung cancer (LC) represents most of the cancer incidences in the world. There are many types of LC, but Lung Adenocarcinoma (LUAD) is the most common type. Although RNA-seq and microarray data provide a vast amount of gene expression data, most of the genes are insignificant to clinical diagnosis. Feature selection (FS) techniques overcome the high dimensionality and sparsity issues of the large-scale data. We propose a framework that applies an ensemble of feature selection techniques to identify genes highly correlated to LUAD. Utilizing LUAD RNA-seq data from the Cancer Genome Atlas (TCGA)
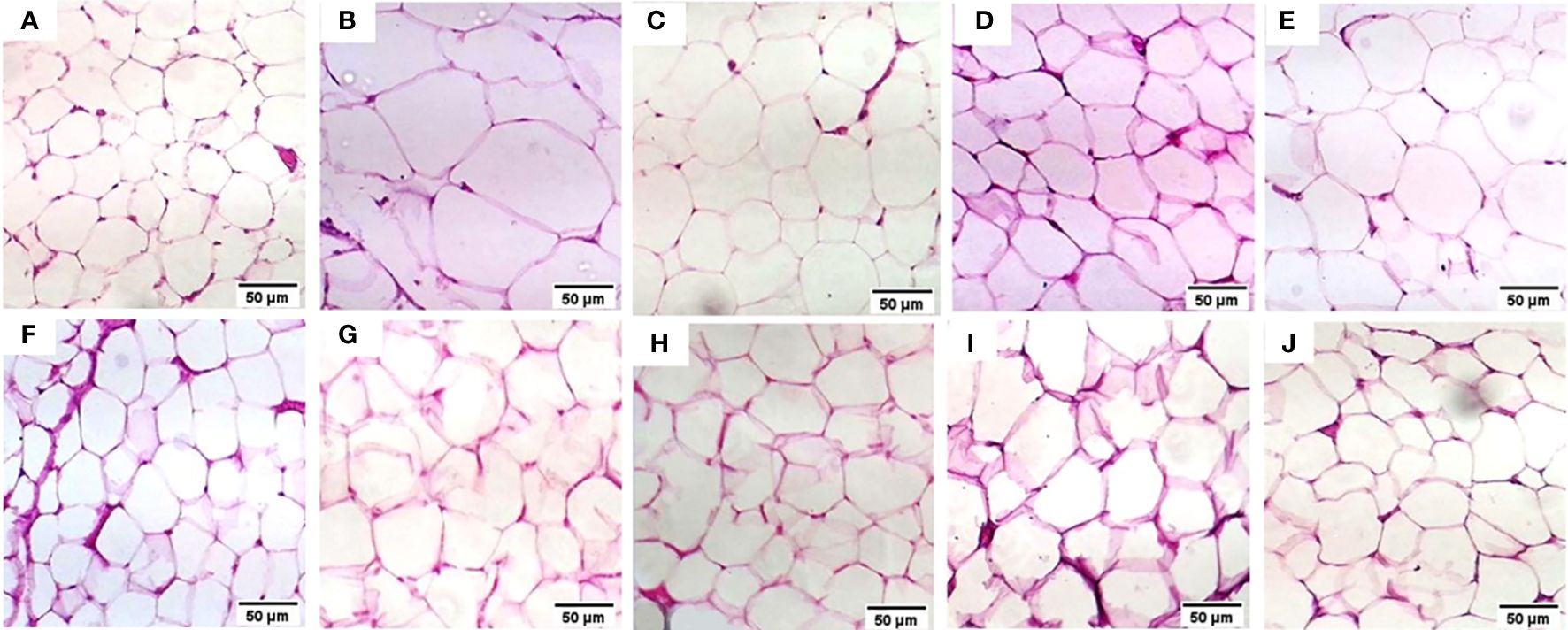
Comprehensive machine learning models for predicting therapeutic targets in type 2 diabetes utilizing molecular and biochemical features in rats
Introduction: With the increasing prevalence of type 2 diabetes mellitus (T2DM), there is an urgent need to discover effective therapeutic targets for this complex condition. Coding and non-coding RNAs, with traditional biochemical parameters, have shown promise as viable targets for therapy. Machine learning (ML) techniques have emerged as powerful tools for predicting drug responses. Method: In this study, we developed an ML-based model to identify the most influential features for drug response in the treatment of type 2 diabetes using three medicinal plant-based drugs (Rosavin, Caffeic