


Mechanical Design
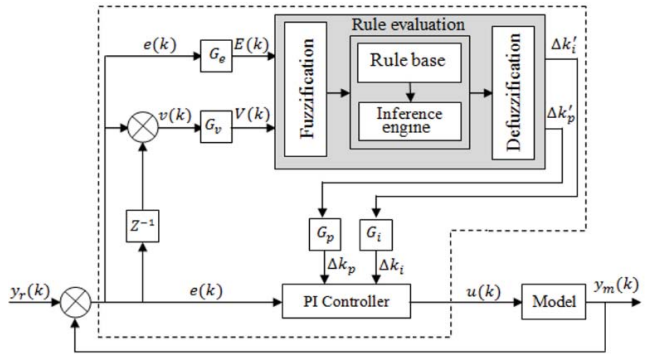
Fuzzy-supervised pi for flow-control process, design and experimental validation
This paper is dedicated to design a fuzzy-supervised PI controller. It is a is a two-level controller, the lower-level controller (LLC) containing the classical PI controller and the upper-level controller (ULC) is a supervisory fuzzy logic controller (FLC). In real time, the ULC modifies, automatically, the parameters of the LLC which, consequently, drive the process to the desired status. The performance of the proposed controller is, primarily, examined by simulating it in MATLAB. Then, it is experimentally validated and compared to the classical PI-control through two test phases, the
Shock System Dynamics of a Morphing Bump Over a Flat Plate
The shock wave boundary layer interaction (SW-BLI) phenomenon over transonic and supersonic airfoils captured the attention of aerospace engineers, due to its disastrous effect on the aerodynamic performance of these vehicles. Thus, the scientific community numerically and experimentally investigated several active and passive flow control elements to reduce the effect of the phenomenon, such as vortex generator, cavity, and bump. They focused on designing and optimizing the shape and location of the bump control element. However, the transit movement of the bump from the state of a clean
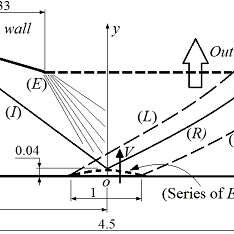
Unsteady Supersonic Flow over a 2-D Morphing Shock Control Bump Using Different Velocity Profiles
Starting with the simple geometry of a flat plate to study the transient phase of the morphing Shock Control Bump (SCB), this paper presents the results of the second phase of our investigation. The SCB is morphed with different velocity profiles at the optimal morphing time from our previous study. Five motion profiles are tested to morph the SCB, namely; linearmotion, parabolic motion, half-parabolic motion, reversed parabolic motion, and half-reversed parabolic motion. The aim of this paper is to numerically determine the suitable velocity profile that minimizes the entropy losses, the lag
Preprocessing Trajectory Learning Techniques For Robots: A comparative study
Many applications in our everyday living are totally depending on using the robots. So that, the need for having smart and more productive robots is increasing. Developing such robots necessitates the programming of the robot. Hence, the machine learning approaches are widely employed to accomplish this objective successfully. Programming the robot can be applied by demonstration such that the skills are transferred to robots through supplying examples of the desired movement. Multiple trajectories are observed and modelled in order to learn new skills by obtaining a general trajectory of the
Mathematical Equations for Developing Ductile Non-Corrosive Reinforced Concrete Walls
Corrosion of steel reinforcement is reason of many deteriorations in RC structures especially in coastal areas. Thus, the conventional steel rebars should be replaced by other alternatives to mitigate this phenomenon, consequently, enhance the durability of structures. In this article, combined utilization of glass fiber reinforced polymer (GFRP) and stainless-steel (SS) is proposed as a substitute of traditional steel. To provide adequate strength and ductility with acceptable cost, GFRP is utilized as distributed and concentrated reinforcement overall wall, while SS is partially used as

Thermodynamic, phase diagram, and high-entropy alloys system: basic concepts
The evolution of alloy-based materials, transitioning from simple binary alloy systems to more intricate compositions, has played a pivotal role in facilitating the advancement of innovative technologies and, in turn, driving social progress. This transformative journey has been accompanied by a significant enhancement in humanity’s capacity to create novel materials. High-entropy alloys (HEAs) have emerged as a recent and noteworthy class of materials due to their novel concept and remarkable properties. These alloys exhibit exceptional mechanical characteristics, boasting impressive strength
Concept, phase selection rule, challenges, and future prospective of high-entropy alloys
High-entropy alloys (HEAs) have emerged as a promising class of materials that exhibit exceptional mechanical properties, corrosion resistance, and high-temperature stability. They have become a significant area of research in the materials science domain owing to their potential for a wide range of applications. This chapter provides an overview of the concept, phase selection rules, the challenges faced, and the future perspectives of HEAs. © 2024 Elsevier Inc. All rights are reserved including those for text and data mining AI training and similar technologies.
Characterization and properties of high-entropy alloys materials
High-entropy alloys (HEAs) are a relatively new class of materials that have been attracting significant attention in material science and engineering research. This chapter provides an introductory discourse on the microstructural characterization and properties of these fascinating materials. The term “HEAs” refers to an innovative concept of metallic materials composed of multiple principal elements, each with concentrations between 5% and 35%. Unlike conventional alloys, which typically comprise one principal element with minor alloying additions, HEAs possess a unique composition that can

A comprehensive guide to high-entropy alloy subgroups
Despite the fact that numerous equiatomic and nonequiatomic high-entropy alloys (HEAs) have been observed to form a single solid solution (SS), it has also been established that several intermediate phases can emerge, some of which exhibit the structural characteristics of intermetallic compounds (ICs) such as Laves, B2, sigma, L12, and amorphous phases. This phenomenon has been extensively documented by researchers, and it is primarily attributed to a range of competing factors, including the mixing enthalpy, mixing entropy, and disparities in atomic sizes among the constituent elements
High-Entropy Alloys: Design, Manufacturing, and Emerging Applications
High-Entropy Alloys: Design, Manufacturing, and Emerging Applications presents cutting-edge advances in the field of these materials, covering their mechanics, methods of manufacturing, and applications, all while emphasizing the link between their structure/microstructure and functional properties. The book starts with a section on the fundamentals of high-entropy alloys (HEAs), with chapters discussing their thermodynamics, subgroups (transition metal; refractory; ceramics; metallic glasses and more), physical metallurgy, and microstructural characterization. The next section features