


Mechanical Design
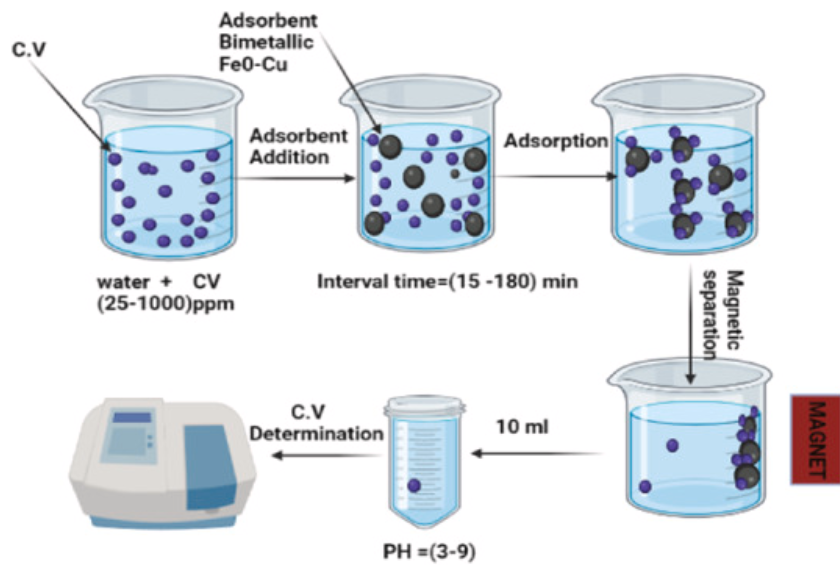
Crystal violet removal using bimetallic Fe0–Cu and its composites with fava bean activated carbon
Nano zero-valent iron (nZVI), bimetallic nano zero-valent iron-copper (Fe0– Cu), and fava bean activated carbon-supported bimetallic nano zero-valent iron-copper (AC-Fe0-Cu) are synthesized and characterized using DLS, zeta potential, FT-IR, XRD, and SEM. The maximum removal capacity is demonstrated by bimetallic Fe0–Cu, which is estimated at 413.98 mg/g capacity at pH 7, 180 min of contact duration, 120 rpm shaking speed, ambient temperature, 100 ppm of C.V. dye solution, and 1 g/l dosage. The elimination capability of the H2SO4 chemical AC-Fe0-Cu adsorbent is 415.32 mg/g under the same
Review on Coral Reef Regeneration Methods through Renewable Powered Electrotherapy
The restoration of coral reef population in coastal regions is currently a growing concern. Many attempts have been made to apply new approaches to limit the deterioration of coral reefs, and to accelerate the growth of new reefs to protect coastal areas and ecosystems using available renewable energy sources. This paper highlights the new approaches and their various advantages and limitations in tidal and wave energy. The paper also suggests improvements to some of those systems using the recent developments in soft robotics, especially the use of biomimetic fish as a feasible support
Bio-inspired adsorption sheets from waste material for anionic methyl orange dye removal
Abstract: Nano zero-valent iron (nZVI), bimetallic nano zero-valent iron-copper (Fe0–Cu), and Raw algae (sargassum dentifolium) activated carbon-supported bimetallic nano zero-valent iron-copper (AC-Fe0–Cu) are synthesized and characterized using FT-IR, XRD, and SEM. The maximum removal capacity is demonstrated by bimetallic activated carbon AC-Fe0–Cu, which is estimated at 946.5 mg/g capacity at the condition pH = 7, 30 min contact time under shaking at 120 rpm at ambient temperature, 200 ppm of M.O, and 1 g/l dose of raw algae-Fe0–Cu adsorbent. The elimination capability of the H3PO4
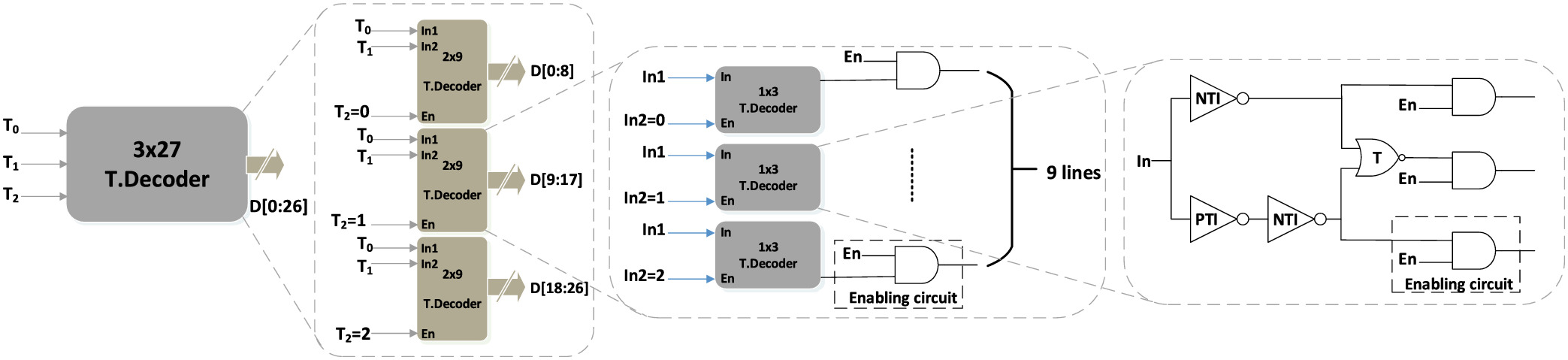
CNTFET-based ternary address decoder design
With the end of Moore's law, new paradigms are investigated for more scalable computing systems. One of the promising directions is to examine the data representation toward higher data density per hardware element. Multiple valued logic (MVL) emerged as a promising system due to its advantages over binary data representation. MVL offers higher information processing within the same number of digits when compared with binary systems. Accessing memory is considered one of the most power- and time-consuming instructions within a microprocessor. In the quest for building an entire ternary
CNTFET-based Approximate Ternary Adder Design
Multiple-Valued Logic (MVL) offers better data representation allowing higher information processing within the same amount of digits. With a trade-off in accuracy, approximate computation is a method to improve the power, size, and speed of digital circuits. This paper presents the design of CNTFET-based ternary half adder, full adder, 2-trit carry ripple adder, and 4trit carry ripple adder with different accuracies. The proposed designs are implemented using HSPICE tool and simulated for power consumption, delay, and error analysis. The trade-off between the transistor count and the
An Efficient Multi-Secret Image Sharing System Based on Chinese Remainder Theorem and Its FPGA Realization
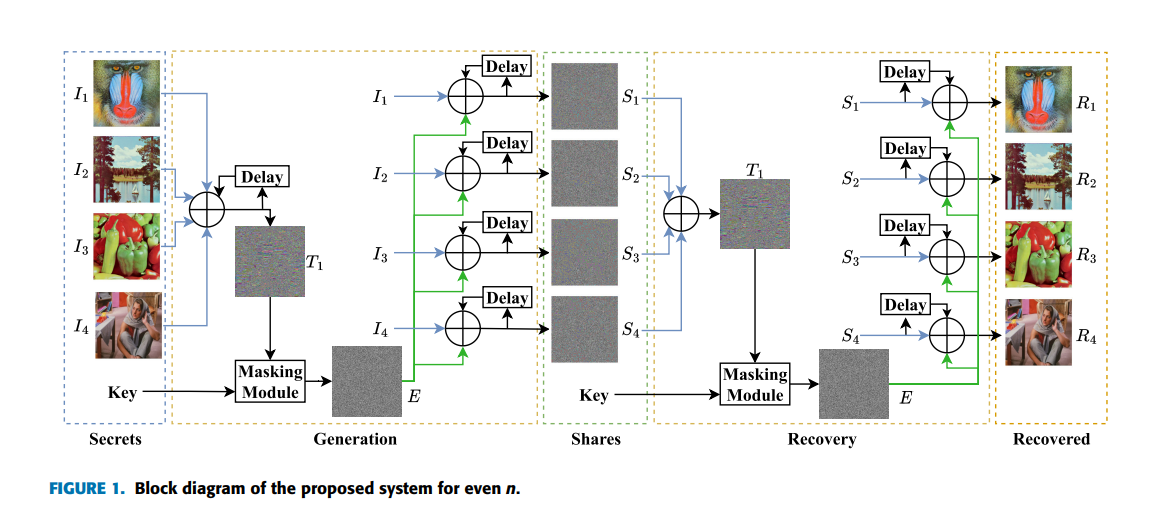
Multi-Secret Image Sharing (MSIS) is important in information security when multiple images are shared in an unintelligible form to different participants, where the images can only be recovered using the shares from participants. This paper proposes a simple and efficient ( n,n )-MSIS system for colored images based on XOR and Chinese Remainder Theorem (CRT), where all the n share are required in the recovery. The system improves the security by adding dependency on the input images to be robust against differential attacks, and by using several delay units. It works with even and odd number
A Unified System for Encryption and Multi-Secret Image Sharing Using S-box and CRT
Multi-Secret Image Sharing (MSIS) is used when multiple images need to be shared to multiple participants, but the images can not be recovered without the presence of all shares. In this paper, a unified system for performing encryption and (n,n)-MSIS is proposed. While MSIS is based on the XOR operation, encryption combines the utilization of Chinese Remainder Theorem (CRT), SHA-256, and S-box for improved security. The same designed system is used for the generation of secret shares and the recovery of secret images. In addition, a sensitive system key is designed where three pairwise
Different Approximation Techniques For A FOPID Feedback Control of a DC Motor
DC motors are commonly employed in many industrial applications due to their various advantages. This study aims to compare the response of the Oustaloup-Recursive-Approximation (ORA) and El-Khazali's approximation method in controlling a DC motor with a FOPID controller. The two employed methods are used to design the FOPID and approximate. For various fractional orders, many behaviours are presented. A simulation comparison between these methods is performed regarding overshoot, settling time and rise time. © 2022 IEEE.

Analysis of plasmonic nanoparticles effects on the performance of perovskite solar cells through surface recombination and short-circuiting behaviors
Plasmonic photovoltaics integrate nanoparticles into the active layer to enhance power absorption. However a gap exists between simulated and experimental IV characteristics. Fabrication studies have attributed the issues to fabrication resolution, and recombination with no detailed step-by-step characterization. To address this issue, the paper presents a comprehensive optical and electrical study of a new plasmonic crescent nanoparticle (CNP). These particles serve as a near-field confinement source to enhance the efficiency of perovskite TiO2-MAPbI3-Spiro solar cells. The proposed design
Bowtie-Shaped Plasmonic Nanoparticles-Enhanced Photovoltaic Anti-Reflective Coating
Light trapping is a promising technique that enhances sunlight absorption by solar cells. This paper presents a study of bow-tie-shaped nanoparticles embedded in the antireflection coating of photovoltaic solar cells, which enhances the optical transmission of the photovoltaic surface. Therefore, the optical path length for light penetration is increased through the semiconductor active layer. First, the fundamental electric field modes of a single nanoscaled bow-tie are examined under excitation of plane waves with different polarizations. Second, an array of bow-tie-shaped nanoparticles is