


Mechanical Design
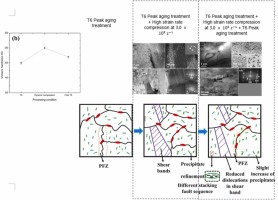
Enhancing mechanical properties of Al-Zn-Mg-Cu alloys: The impact of high strain rate compression and subsequent heat treatment on microstructural evolution
This study presents a comprehensive examination of the Al-Zn-Mg-Cu alloy, focusing on the effects of high strain rate dynamic compression and heat treatment on its performance. The research aimed to understand the underlying microstructural mechanisms contributing to the enhanced mechanical properties of the alloy, which is critical for applications in aerospace and automotive industries. High strain rate dynamic compression tests, conducted at 3.0 × 1000 s−1, revealed a significant increase in both yield strength and ultimate compression strength of the Al alloy, which was accompanied by a
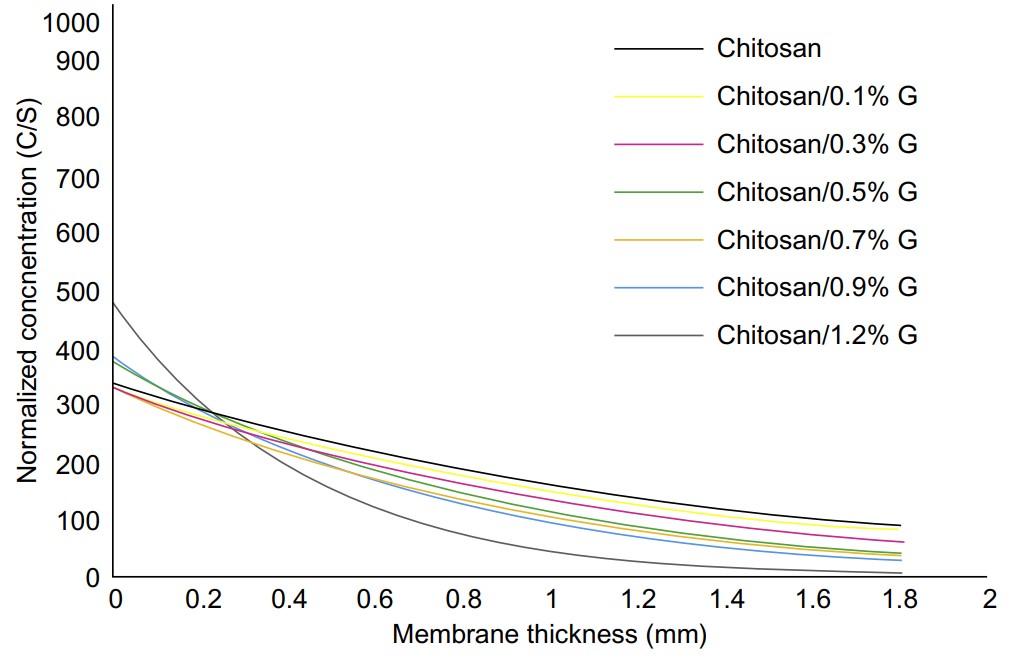
Design and fabrication of CNT/graphene-based polymer nanocomposite applications in nanosensors
Development and improvement of nanosensors have been active research areas over the last few decades. Many materials and compounds have been investigated for their sensing properties. This work is concerned with developing a new sensing layer for gas sensors based on chitosan as a polymer enhanced with graphene as a nanofiller. The graphene used for preparing the chitosan solution was at 0.1, 0.5, and 1 wt%. Many characterizations (such as using different pore size, gas permeability, mechanical properties, and electrical resistance) were tested to give full insight into the nanocomposite
Optimum Selection of Communication Tower Structures Based on Wind Loads & lifecycle cost analysis
Communication towers are vital assets in our daily lives as they transfer signals between cell phones facilitating communication and commerce among people and businesses all around the world. Wind loads are crucial in the communication towers design since they are tall and slender. With climate change bringing more storms and higher wind speeds, it is more crucial to research the finest tower structure that withstands such conditions with the least life cycle cost. Therefore, in this paper, a comparative case study is performed between 45 m height lattice tower and monopole tower in Egypt. Two
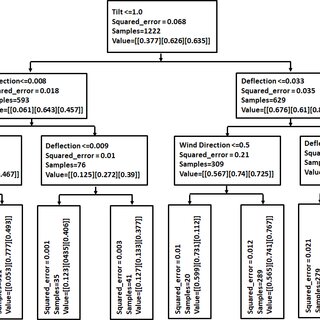
Stability Analysis and Fault Detection of Telecommunication Towers Using Decision Tree Algorithm under Wind Speed Condition
This paper presents a decision tree (DT) modeling technique to estimate any increase in the load on telecommunication towers. A structural analysis was done for the lattice and mono-pole towers using TNX Tower software to determine the basic features of the towers, such as tilt angle, deflection, twist, and acceleration. The structure analysis generated a data set based on wind speeds. This data set was then used to train a machine-learning algorithm to estimate the loads on the structure. Any change in the applied loads greater than the loads considered in the design might be identified using
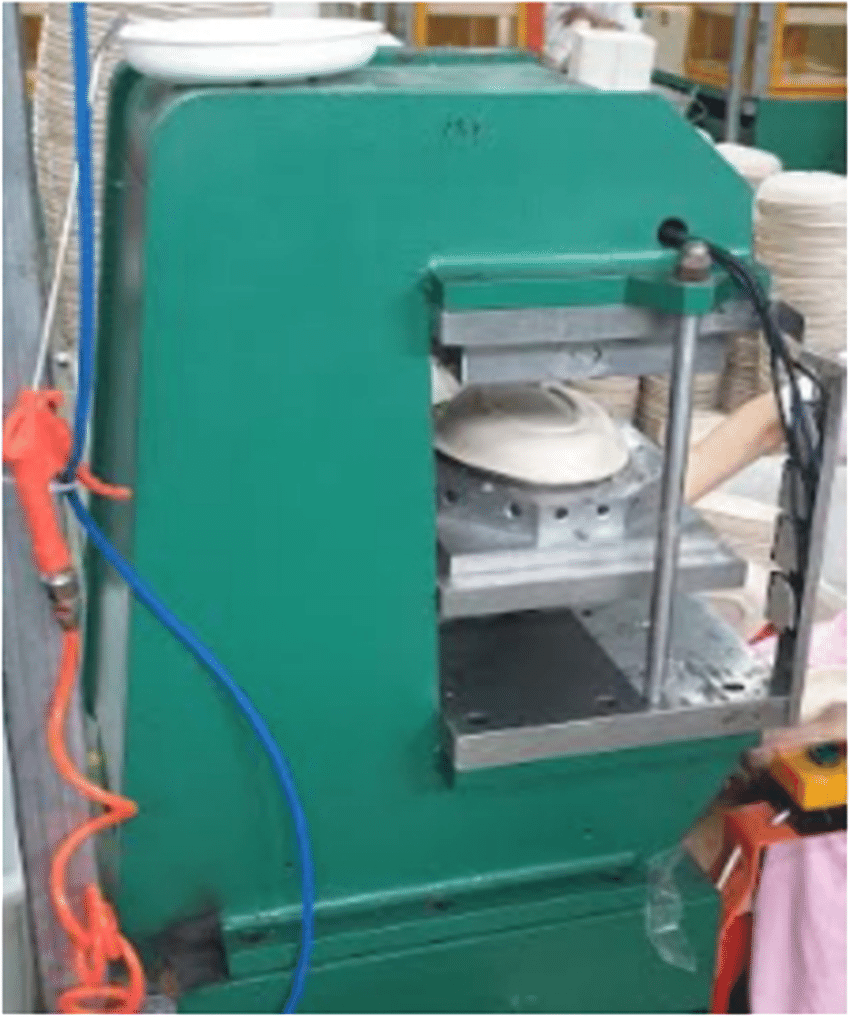
Green and Sustainable Packaging Manufacturing: a Case Study of Sugarcane Bagasse-Based Tableware in Egypt
Bagasse-based products contribute to solving the plastic pollution problem. This paper presents an alternative by producing bioplastic products that can be manufactured in many forms ranging across different industries such as food packaging, single use tableware, and crafts. The researchers aim to prove the alternative’s market variability through conducting a feasibility study of establishing a technological manufacturing plant producing bagasse-based tableware in Egypt. Researchers performed different scenarios aiming to reach the best cost, quality, resources, and profitability of
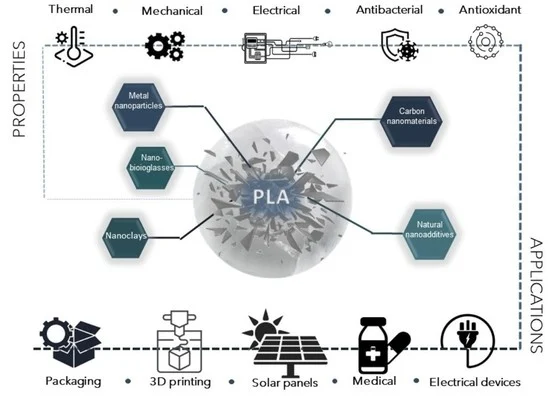
Polylactic acid-based bionanocomposites: Synthesis, properties, and applications
The awareness of the severe environmental consequences of petroleum-based plastics has expanded globally. Therefore, academic and industrial researchers have been extremely encouraged to investigate replacing traditional petrochemical-based plastic products with biobased and biodegradable alternatives in order to minimize fossil fuel consumption. Among the biopolymers available nowadays, polylactic acid (PLA) is one of the tops produced and seems to be a promising candidate to commercially replace many nondegradable polymers. Although PLA offers comparable mechanical properties, inherent
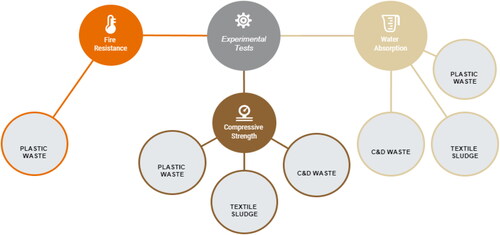
Exploring the potential of incorporating plastic waste, textile sludge, and construction and demolition waste into concrete: a comparative study
Waste is considered a significant environmental issue in modern times thus the purpose of this paper is to compare the use of different waste materials in replacing aggregates in concrete. This study investigates the potential of incorporating plastic waste (PW), textile sludge (TS), and construction and demolition waste (CDW) into concrete as sustainable alternatives to traditional construction materials, by evaluating its mechanical, durability characteristics as well as the cost related to different process of the project. The study focuses on the use of PW and TS as a replacement for fine
Multi-disciplinary Engineering Education: Properties of materials course as a case study in Architecture and Industrial Engineering
The primary concern in developing future engineers is engineering education. Designing, planning, and implementing an engineering project necessitates using multi-disciplinary engineers who understand how to manage an integrated project. To achieve the goal as mentioned earlier, we should teach students some related subjects from other programs in various programs. The issue is how to teach these subjects to gain the most necessary knowledge properly. For example, teaching materials and structure courses to architecture, electrical, and mechanical students while keeping them useful and
Microfactory strategic decision making using simulation
This paper aims to study how the agility concept is successfully applied in manufacturing facilities. The study is involved in selecting the industry and the machines for the novel Microfactory established at Nile Preneurs, Nile University, with focus on the sheet metal workshop located in the Microfactory. The recommendations of this work include the most suitable layout, scheduling technique according to the manufacturing lead time, utilization, work in process, tool change over and distance travelled by operators. Flexsim simulation software is used to determine the optimum combination of
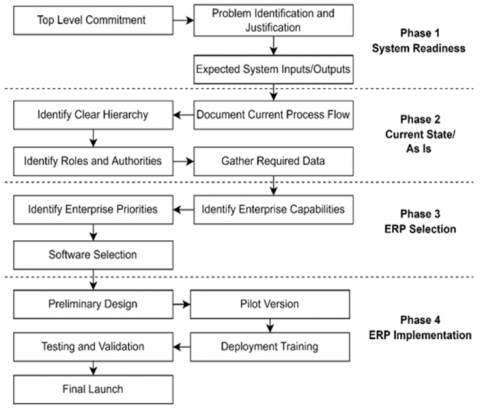
Novel Integrated Framework for ERP Selection and Implementation
As the economic pressure on businesses increases, organizations try to adopt innovative technology solutions to cope with this pressure and adapt to the rapid market changes. Particularly for small and medium enterprises (SMEs). They must integrate all resources and information levels to highly utilize their limited resources and survive the local and global competition. This could be achieved by adopting the best suitable Enterprise Resource Planning (ERP) system. On the other hand, properly selecting and implementing the right ERP system is challenging for many reasons. Hence, this paper