


Mechanical Design
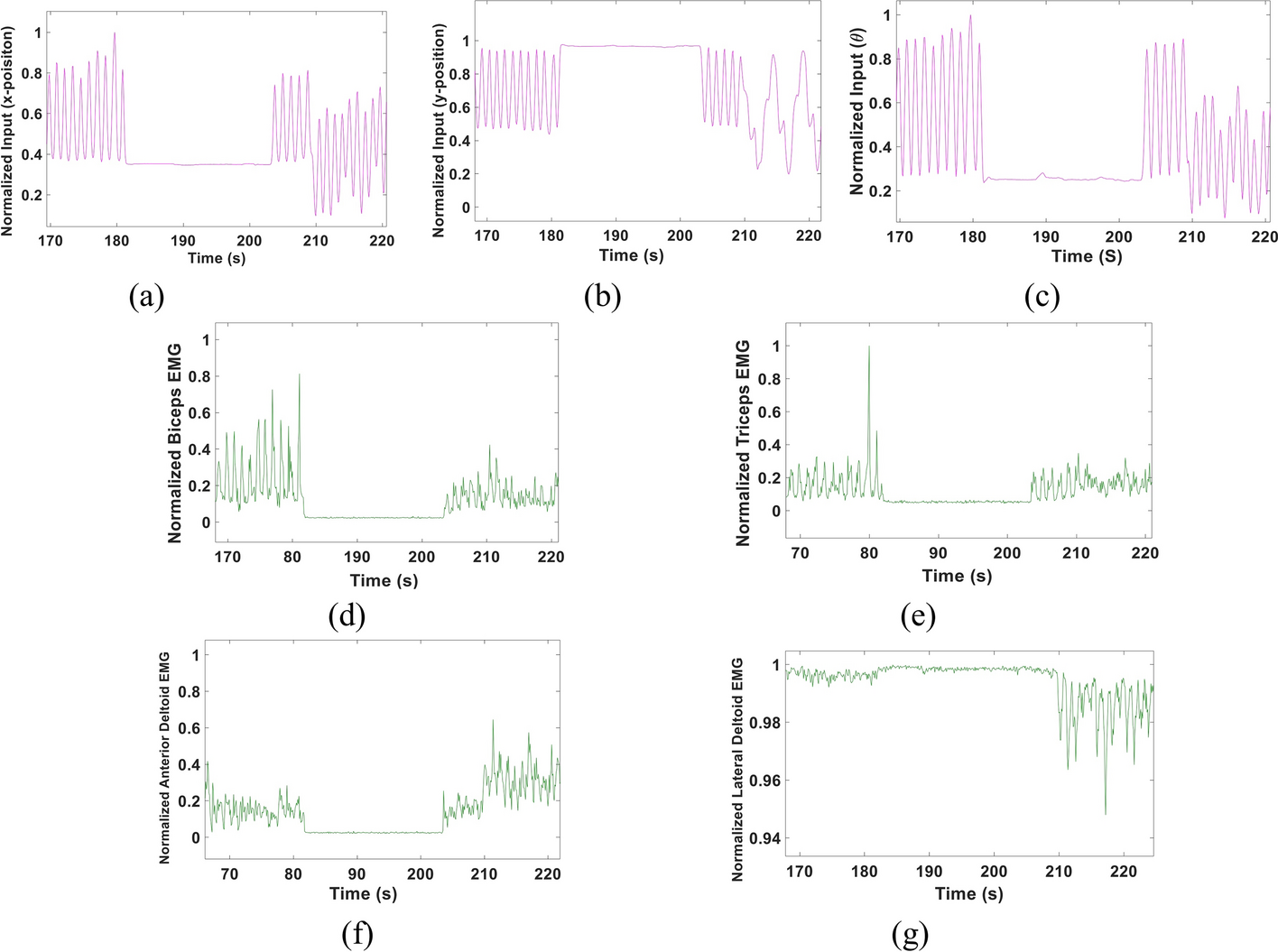
A multi-Kalman filter-based approach for decoding arm kinematics from EMG recordings
Background: Remarkable work has been recently introduced to enhance the usage of Electromyography (EMG) signals in operating prosthetic arms. Despite the rapid advancements in this field, providing a reliable, naturalistic myoelectric prosthesis remains a significant challenge. Other challenges include the limited number of allowed movements, lack of simultaneous, continuous control and the high computational power that could be needed for accurate decoding. In this study, we propose an EMG-based multi-Kalman filter approach to decode arm kinematics; specifically, the elbow angle (θ), wrist
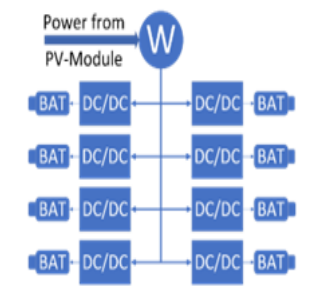
Developing Role Model of PV Powered Battery Swapping Stations for e-scooters in Urban Regions
Electric vehicles (EVs) can only provide lower carbon emissions than conventional, internal combustion-powered vehicles if they are charged using green energy. They also have the drawback of long charging times to 'refuel' them. To combat these two problems, a solar-powered battery charging and swapping station was developed using centered-human design and systems engineering. The design focuses on electric two-wheeled vehicles (e-scooters) due to the easier handling of their light and low-capacity batteries compared to electric cars. These stations are easy to maintain and manage and can be
Influence of increasing amount of attapulgite on the performance properties of Cu-free brake-pads
Copper is almost inevitable functional filler in the brake-material and efforts to replace it are continuing since it is now known as a hazard to the aquatic life. It is always desirable to search for ingredients for Cu-free brake-pads, which will be beneficial for friction-related properties and especially fade resistance. Attapulgite, is a mineral which was proven to be an excellent substitute for asbestos in brake-pads long back. However, hardly anything in details is reported on its exact role in controlling tribo-properties of friction materials (FMs). It was of interest, if it can be
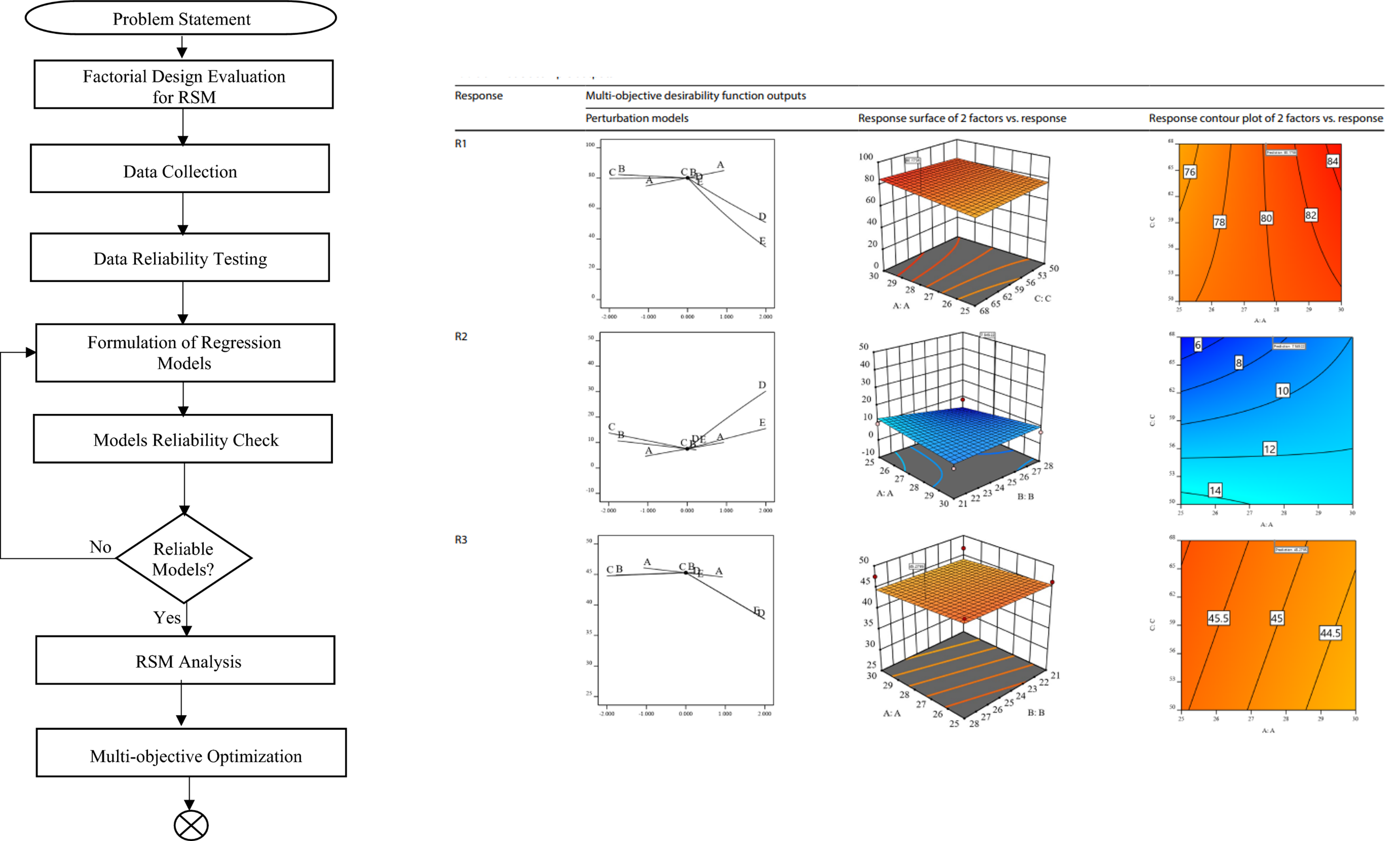
Multi-objective ergonomics design model optimization for micro electric cars via response surface methodology
Despite advancements in ergonomic comfort assessments in automotive design, optimizing seat dimensions within the constrained spaces of micro-electric cars presents a substantial challenge. In this study, response surface methodology (RSM) is utilized for the ergonomics design of a micro electric car in the conceptual design phase. Specifically, five critical seat dimensions are analyzed: Seatback Angle, Seat Base Angle, Steering Wheel Height from Car Base, Distance from Seat Base to Pedals, and Distance from Seat Base to Steering Wheel. The analysis took place using a 2-level full factorial

Hybrid Irrigation System in Egypt: Design and Optimization
This presents a hybrid photovoltaic/diesel system simulated as an alternative to the diesel generators required for water pumping systems. This hybrid system is designed to overcome the limitations of the fluctuating price and availability of diesel generators, ensure a reliable supply without interruptions, and improve the overall system efficiency. The system configuration offers an economical benefits over fully renewable hybrid systems or PV only systems. The novelty of the system design lies in minimizing its complexity in terms of design size and control while using a 10 KW photovoltaic
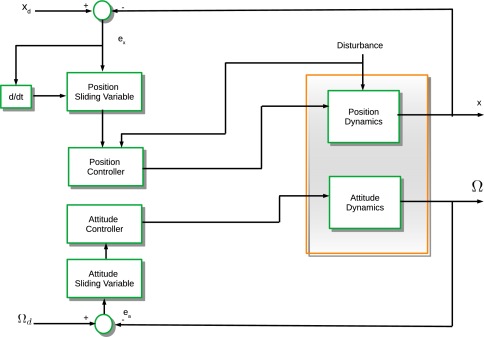
Robust fractional-order sliding mode control design for UAVs subjected to atmospheric disturbances
Trajectory tracking of unmanned aerial vehicles (UAVs) has been studied nowadays because it is necessary to design new controllers under different conditions. Severe atmospheric conditions are one of the major problems to overcome according to the path of the UAV. Conditions such as wind speed that can vary according to the weather conditions can affect the flight performance and of course in extreme cases can lead to stability problems. Some kinds of severe conditions are storms, snow, and hurricanes. These conditions are considered as disturbances in the roll, pitch, and yaw orientations of

Di- and tri- cyclic aromatic hydrocarbons removal using different prepared materials based Sargassum dentifolium algae, and iron oxide
Polycyclic aromatic hydrocarbons (PAHs) are highly toxic and carcinogenic compounds as they are low water solubility, hardly degradable and may persist in the environment for many years. Therefore, this study was directed to PAHs ‘anthracene and naphthalene’ removal using a combination method between adsorption and degradation using sunlight. Three adsorbent materials, iron oxide (Fe) alone, Sargassum dentifolium (S) alone, and mixture of Iron oxide and Sargassum dentifolium (FeS) were prepared. Afterwards, optimisation process was performed for the three adsorbent forms through some
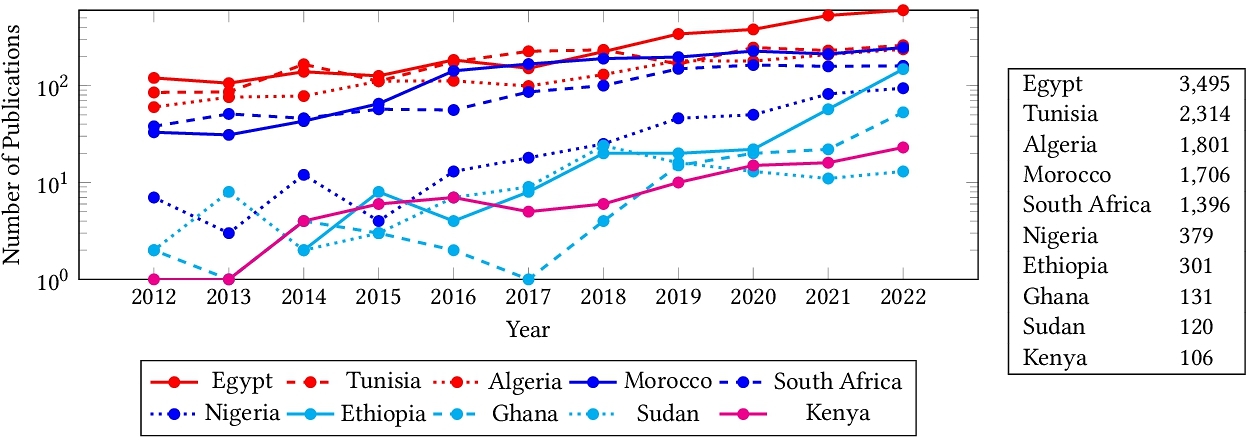
The State of Computer Vision Research in Africa
Despite significant efforts to democratize artificial intelligence (AI), computer vision which is a sub-field of AI, still lags in Africa. A significant factor to this, is the limited access to computing resources, datasets, and collaborations. As a result, Africa's contribution to top-tier publications in this field has only been 0.06% over the past decade. Towards improving the computer vision field and making it more accessible and inclusive, this study analyzes 63,000 Scopus-indexed computer vision publications from Africa. We utilize large language models to automatically parse their
Application of unified modelling language on firm's supply chain
Supply chain stages are known to be complex and variable. Variability and complexity increase due to the increased numbers of the stakeholders. Unified Modelling Language (UML) is known to be efficient in visualizing complex systems and highlighting both major and minor activities, hence provides stakeholders with better understanding and visualizing of the overall system. In this paper, UML models are developed and employed to model supply chain stages for a manufacturing firm. Functional, behavioral, and structural models are developed and explained throughout the paper. These UML models

Rehabilitation of the Lower Limb Motor Skills for Patients Using Cable-Driven Robot
As the technological advancements in felid such as electronic, robotics, and artificial intelligence continue to grow and flourish, the more the traditional methods of doing things starts to get absolute. This phenomenon cannot be more clearly observed in like medicine, technological advancements changed the ways things are done from the way that the doctors preform their surgical operations to the way they prescribe pills and after surgery treatments. The purpose of this work is to develop a low-cost cable-driven manipulator robot to be used in the rehabilitation of human lower limb problems