Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network
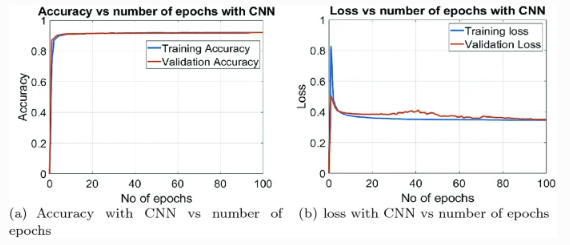
This paper presents a way to solve inverse kinematics of a 7-DOF manipulator using artificial neural networks. The manipulator consists of a 6-DOF articulated arm installed on a linear guide system to increase the workspace of the robot. The purpose of this paper is to provide an alternative to the traditional and complicated way to solve inverse kinematics by using artificial neural networks. The training data is generated from MATLAB after obtaining the DH parameters and workspace of the manipulator. Then, it was fed to the convolutional neural architecture to obtain a model for the manipulator. The input of the CNN is the end effector desired pose, and the outputs are the position angles of each joint. Two different architectures of artificial neural networks are compared to decide the most efficient architecture that produces the most accurate descriptive model of the manipulator. © 2020, Springer Nature Switzerland AG.
Related Publications