


Mechanical Design
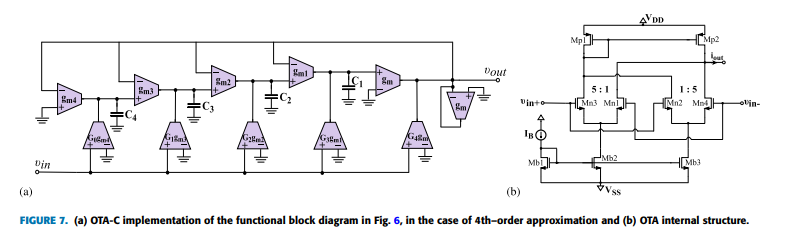
Design of Higher-Order Fractional Filters With Fully Controllable Frequency Characteristics
Higher-order fractional filters with fully controllable frequency characteristics are realized in this work, after fitting the filter's magnitude response data using a minimum-phase state-space model. Subsequently, rational integer-order transfer functions are derived and implemented using as active elements: a) Operational Transconductance Amplifiers (OTAs) and b) a Field Programmable Analog Array (FPAA) device. The realized filters enjoy electronic adjustability of their type, order, and characteristic frequencies while being easily validated on the digitally programmable FPAA platform. ©
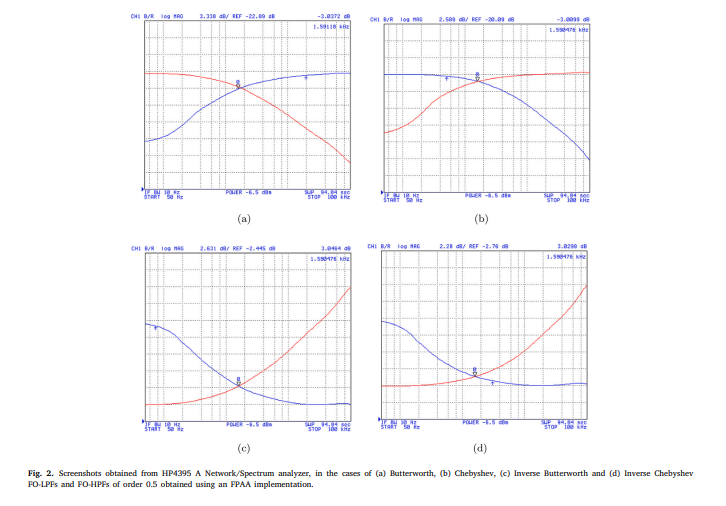
One active element implementation of fractional-order Butterworth and Chebyshev filters
Fractional-order low-pass and high-pass Butterworth and Chebyshev filters with cut-off frequencies determined independently of their order are approximated in this work. The already available schemes in the literature have a cut-off frequency pre-determined by the pole frequency value, and hence the filter's order. The derivation of rational integer-order approximation functions, which approximate the frequency behavior of the filters, is performed through the utilization of a magnitude curve-fitting based method. The form of the transfer function is common for all filter functions, providing
Complex-order controller design examples and their implementation
A systematic method for approximating the complex-order Laplacian operator by realizable integer-order transfer functions is presented in this work. The realization is performed by a simple structure where only one active element is used. Thanks to the employment of complex-order impedances, both integrators and differentiators can be readily implemented by the same core simply by interchanging the associated impedance locations. The validity of the presented concept is verified through simulation and experimental results, using the OrCAD PSpice suite and a Field Programmable Analog array
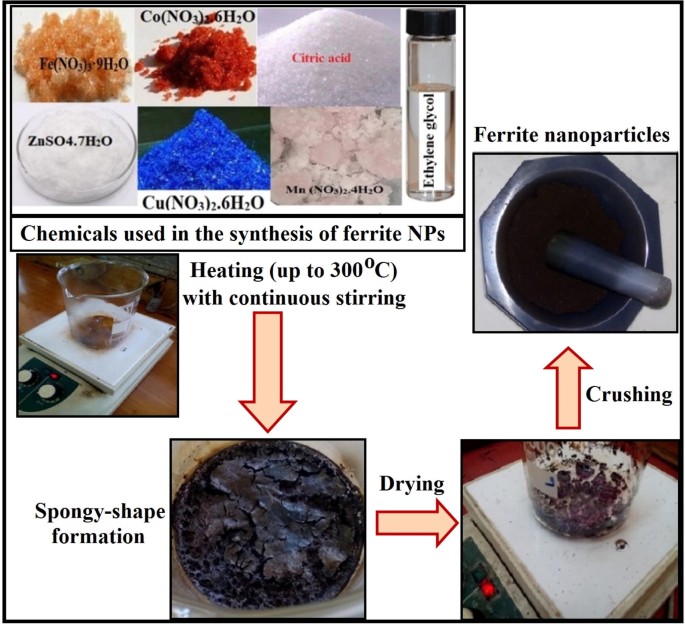
Controllable synthesis of Co1−x M xFe2O4 nanoparticles (M = Zn, Cu, and Mn; x = 0.0 and 0.5) by cost-effective sol–gel approach: analysis of structure, elastic, thermal, and magnetic properties
Substitutions of cations were considered to be the main way for improving the performance of ferrite nanocrystalline structures. In this paper, non-magnetic and magnetic ions were conducted to substitute cobalt spinel ferrite nanoparticles CoFe2O4 NPs (CFO NPs). The studied Co1−xMxFe2O4; M = Zn, Cu, and Mn; x = 0.00, and 0.50) samples were synthesized through a cost-effective sol–gel technique. The outstanding properties of the samples are addressed using XRD, FTIR, the inductively coupled plasma optical emission spectrometer (ICP-OES), Raman analyses, HR-TEM, BET surface area analyzer, the
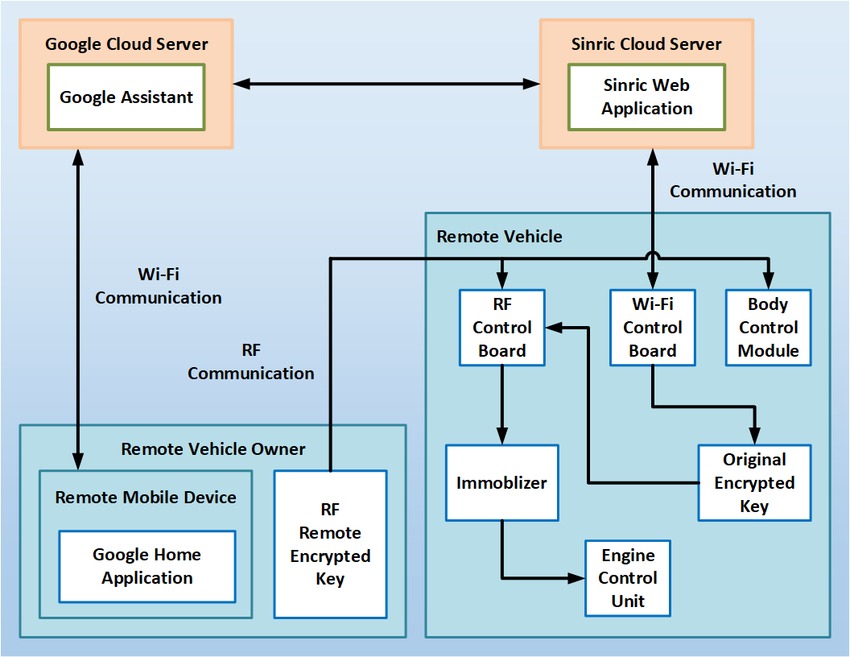
A Reliable Secure Architecture for Remote Wireless Controlling of Vehicle's Internal Systems based on Internet of Vehicles using RF and Wi-Fi
Internet of Vehicles is considered one of the most unprecedented outputs of the Internet of Things. No one has realized or even expected the rapidly-growing revolution regarding autonomous connected vehicles. Nowadays, Internet of Vehicles is massively progressing from Vehicular Ad-Hoc Networks as a huge futuristic research and development discipline. This paper proposes a novel reliable and secure architecture for ubiquitously controlling remote connected cars' internal systems, such as engine, doors' locks, sunroof, horn, windows' and lights' control systems. The main contribution is that
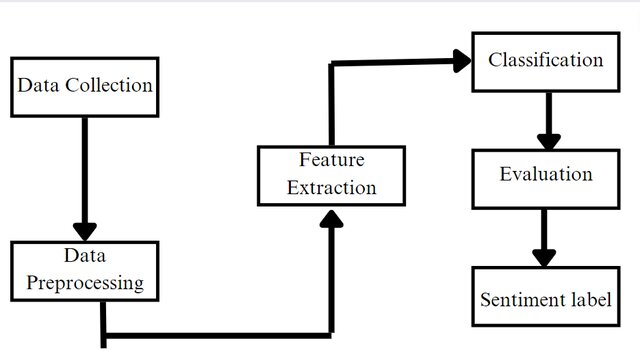
Sentiment Analysis On Arabic Companies Reviews
This study introduces an innovative approach to sentiment analysis, specifically tailored for the Arabic language, a domain that poses unique challenges due to its complex morphology and diverse dialects. Utilizing a substantial dataset of over 108,000 reviews related to Arabic companies, our primary objective was to develop a robust and reliable sentiment scoring system that caters to the intricacies of the Arabic language, aimed at assisting businesses in understanding customer sentiments more effectively.Our methodology encompassed an extensive preprocessing phase, crucial for preparing the
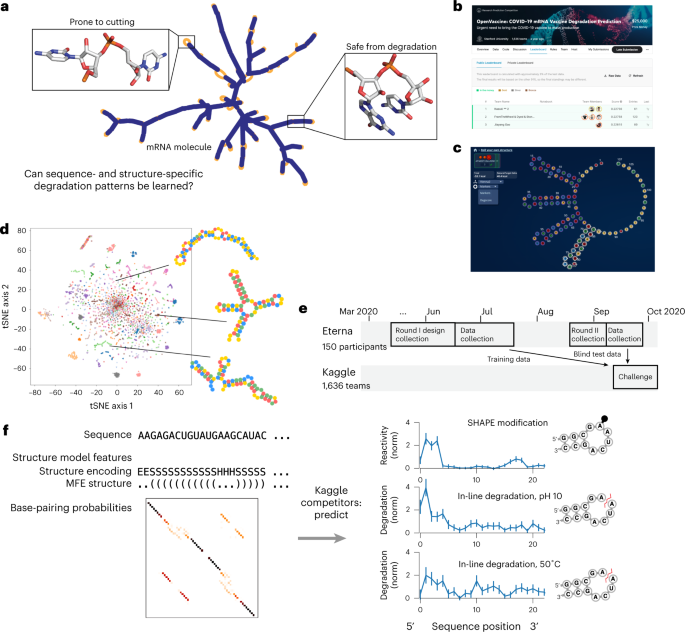
Deep learning models for predicting RNA degradation via dual crowdsourcing
Medicines based on messenger RNA (mRNA) hold immense potential, as evidenced by their rapid deployment as COVID-19 vaccines. However, worldwide distribution of mRNA molecules has been limited by their thermostability, which is fundamentally limited by the intrinsic instability of RNA molecules to a chemical degradation reaction called in-line hydrolysis. Predicting the degradation of an RNA molecule is a key task in designing more stable RNA-based therapeutics. Here, we describe a crowdsourced machine learning competition (‘Stanford OpenVaccine’) on Kaggle, involving single-nucleotide

Vehicle to Pedestrian Systems: Survey, Challenges and Recent Trends
The accelerated rise of new technologies has reshaped the manufacturing industry of contemporary vehicles. Numerous technologies and applications have completely revolutionized the driving experience in terms of both safety and convenience. Although vehicles are now connected and equipped with a multitude of sensors and radars for collision avoidance, millions of people suffer serious accidents on the road, and unfortunately, the death rate is still on the rise. Collisions are still a dire reality for vehicles and pedestrians alike, which is why the improvement of collision prevention
The FDA-Approved Drug Cobicistat Synergizes with Remdesivir to Inhibit SARS-CoV-2 Replication in Vitro and Decreases Viral Titers and Disease Progression in Syrian Hamsters
Combinations of direct-acting antivirals are needed to minimize drug resistance mutations and stably suppress replication of RNA viruses. Currently, there are limited therapeutic options against the severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2), and testing of a number of drug regimens has led to conflicting results. Here, we show that cobicistat, which is an FDA-approved drug booster that blocks the activity of the drug-metabolizing proteins cytochrome P450-3As (CYP3As) and P-glycoprotein (P-gp), inhibits SARS-CoV-2 replication. Two independent cell-to-cell membrane fusion
Immunoinformatics approach of epitope prediction for SARS-CoV-2
Background: The novel coronavirus (SARS-CoV-2) caused lethal infections worldwide during an unprecedented pandemic. Identification of the candidate viral epitopes is the first step in the design of vaccines against the viral infection. Several immunoinformatic approaches were employed to identify the SARS-CoV-2 epitopes that bind specifically with the major histocompatibility molecules class I (MHC-I). We utilized immunoinformatic tools to analyze the whole viral protein sequences, to identify the SARS-CoV-2 epitopes responsible for binding to the most frequent human leukocyte antigen (HLA)