Design, simulation, and kinematics of 9-DOF Serial-Parallel Hybrid Manipulator Robot
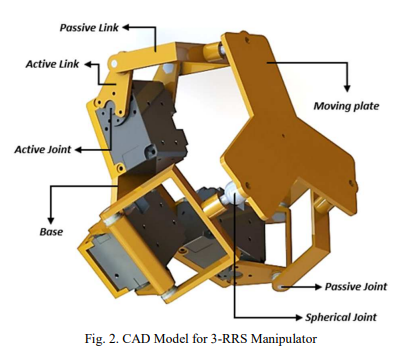
Serial manipulator robot is one of the most advanced robots in the last decade. The demand for this type of robot leads the researchers to develop and improve the robot to increase its workspace, speed and to minimize the control complexity. This paper presents a novel robot configuration that combines a 6 DOF serial manipulator with a 3 DOF spherical parallel wrist. The serial manipulator is KUKA kr6 R900 type, which is a real industrial robot. At the same time, the parallel spherical wrist is 3-RRS type (Revolute- Revolute-Spherical Joint), which can support one translation movement in the Z-axis and two movements for orientations in the X-Y axis. This new model is designed to enhance the serial robot performance by increasing the position and orientations of the end-effector. The paper presents a complete conceptual design for the new robot configuration. Then, a kinematic model was derived, and a complete simulation model using SimScape was presented. The mathematical outcomes and the corresponding simulation of different postures of the hybrid manipulator are compared, and the maximum induced error between numerical and simulation was less than 1%. Finally, the newly presented robot configuration was able to expand the workspace of the robot. © 2021 IEEE.
Related Publications

Analysis of plasmonic nanoparticles effects on the performance of perovskite solar cells through surface recombination and short-circuiting behaviors