Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
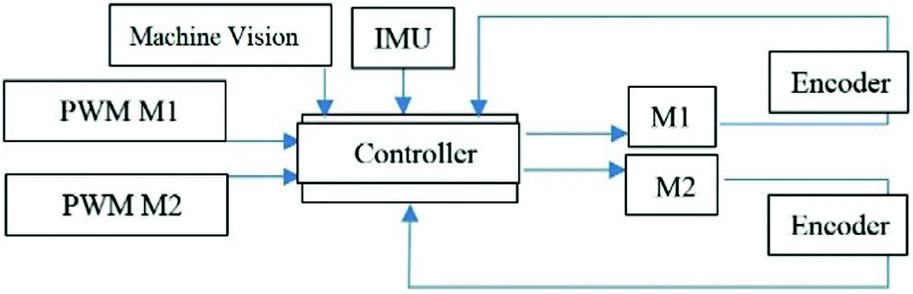
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path tracking of the skid steering mobile robot and improve its response. Utilizing Machine vision provides better results than that of the IMU sensor and the encoders. The fuzzy self-tuning of PID controller shows better dynamic results than the fuzzy logic and PID controllers. © 2020, Springer Nature Switzerland AG.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments