




Prof. Raafat Shalaby
Program Director of Master of Science in Mechatronics Engineering (MECT)
Faculty Office Ext.
1740
Faculty Building
UB2
Office Number
S25
Biography
Dr. Raafat Shalaby is a Full Professor of Intelligent Control Systems at the Mechanical Engineering Program, Nile University. With over 20 years in academia, he has held leadership roles, including Director of the Mechatronics Master’s Program at Nille University (2022–present) and former Director of the Mechanical Engineering Program at Nile University (2020–2022).
He earned his Ph.D. (Dr.-Ing.) in Industrial Electronics and Control Engineering from the Faculty of Electrical Engineering at the Technical University of Berlin (TU-Berlin), Germany, in 2011, following a B.Sc. and M.Sc. in Automatic Control from Menofia University.
Prof. Shalaby has a rich teaching portfolio, having taught undergraduate and graduate courses across major Egyptian institutions. His teaching philosophy centers on inspiring students to exceed their limits through discipline and perseverance.
His interdisciplinary research spans intelligent control systems, fractional-order modeling, meta-heuristic optimization, and machine- and reinforcement learning—particularly for mechatronic and biomedical applications. He has authored over 45 peer-reviewed publications and currently supervises numerous M.Sc. and Ph.D. theses.


Projects
Research Project
Developing Robot Assisted Therapy for Upper Limb Using Virtual Reality and Machine Learning
The proposed device aims to optimize the physical rehabilitation experience for patients with upper limb dysfunctionality via the usage of virtual reality games and customized therapy programs. The system will be provided with a variety of gaming scenarios for each patient and the movement will be determined based on the patient’s condition. Objective/Contributions: The proposed research aims to

Research Project
Motion Planning and Control for a Multi-Purpose AI Based Autonomous Robot
Numerous algorithms have been developed over the last few years to create real-time path-planning systems for autonomous robots. There are three things or activities that must be followed or carried out by an autonomous robotic system to enable the execution of the task of robot navigation. These activities are mapping and modeling the environment, path planning and driving systems. The selection
Research Project
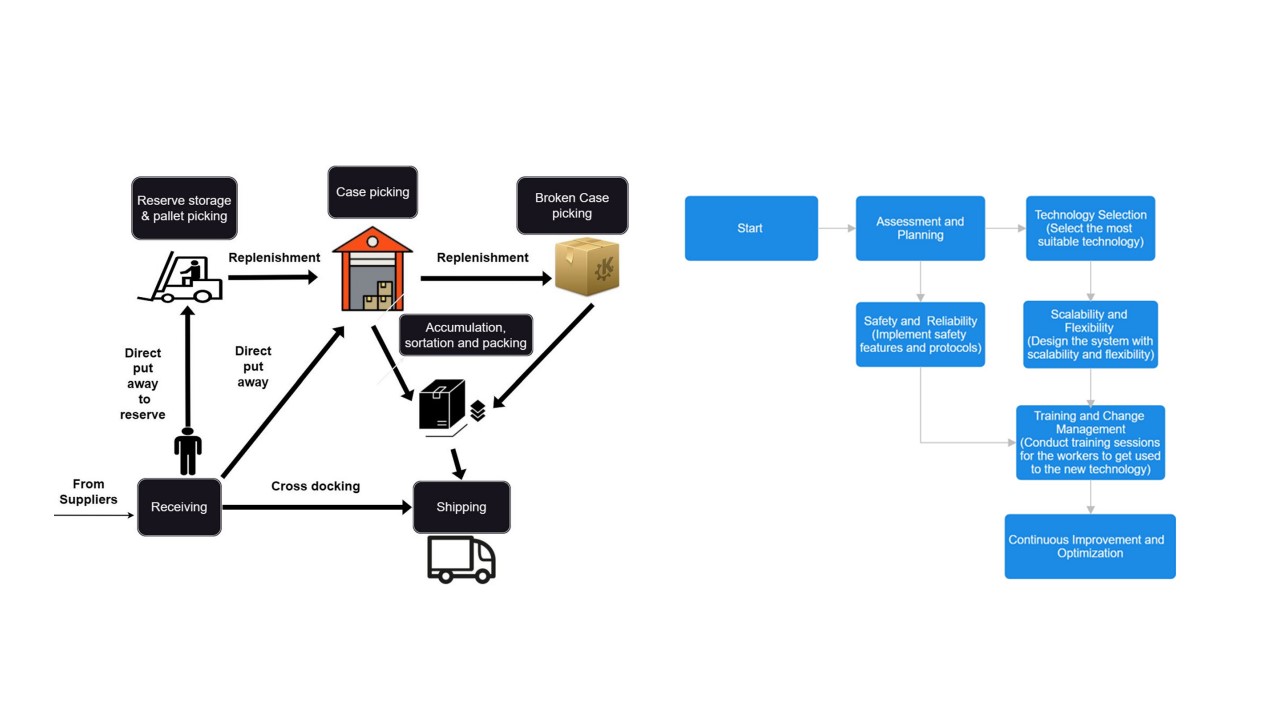
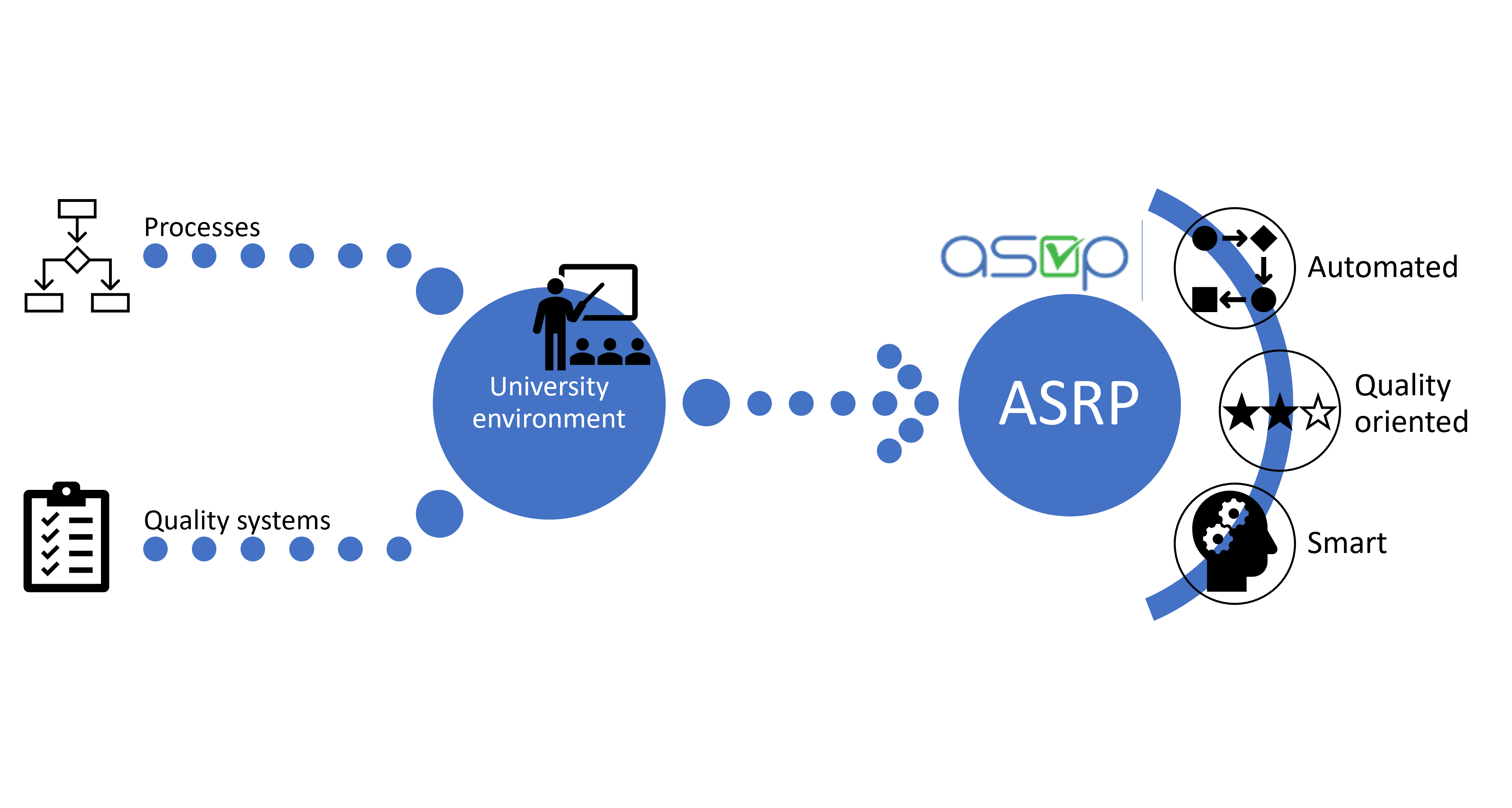
Academic System Resource Planning: A Fully-Automated Smart Campus/ASRP
Objectives: The project aims at creating a smart automated academic and administrative university environment infiltrating the global perspective of Education Quality and best practices for University Management and Academic System Resource Planning within the HE system in EG through the design and development of a smart digital platform for monitoring, analysis and closed-loop feedback control of
Research Project
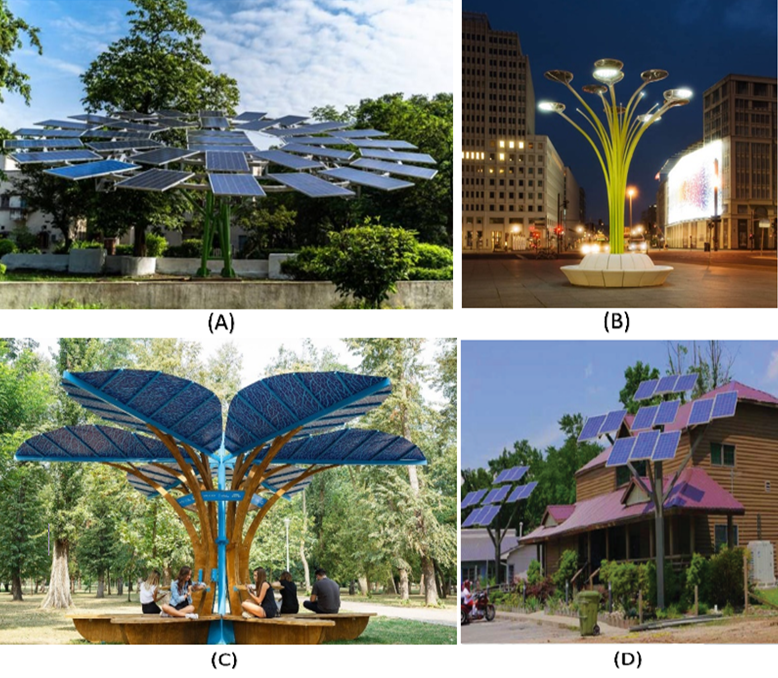
Optimization of Solar Tree Performance in Egypt: A Simulation-Based Investigation
Abstract This project explores the optimization of solar tree performance in Egypt through the orientation and positioning of solar panels. Solar energy is a crucial and abundant resource in Egypt, and the paper proposes the use of solar trees as a promising solution to harness this energy efficiently. The design process involves two main aspects: optimizing the orientation of solar panels and
Research Project
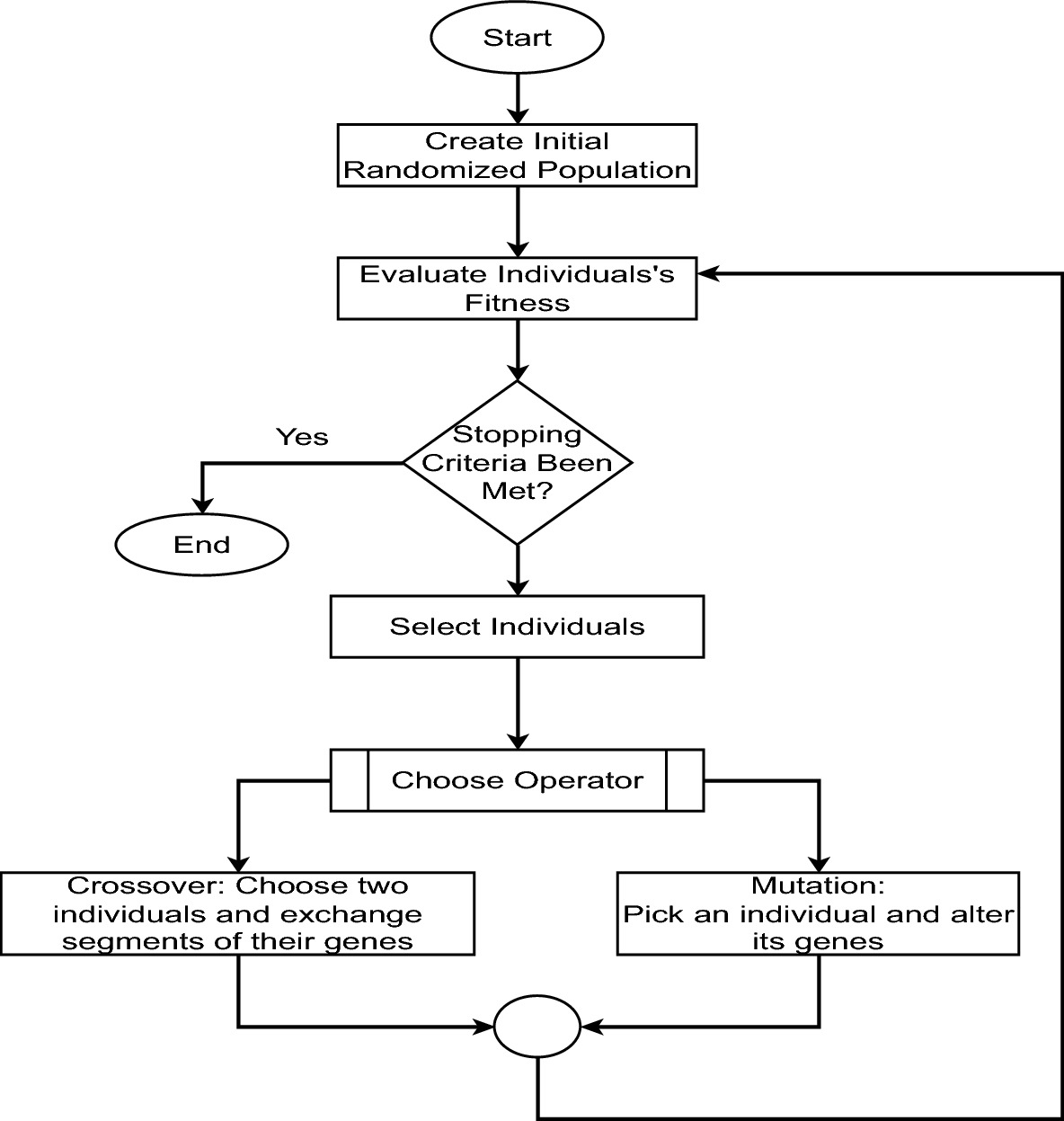
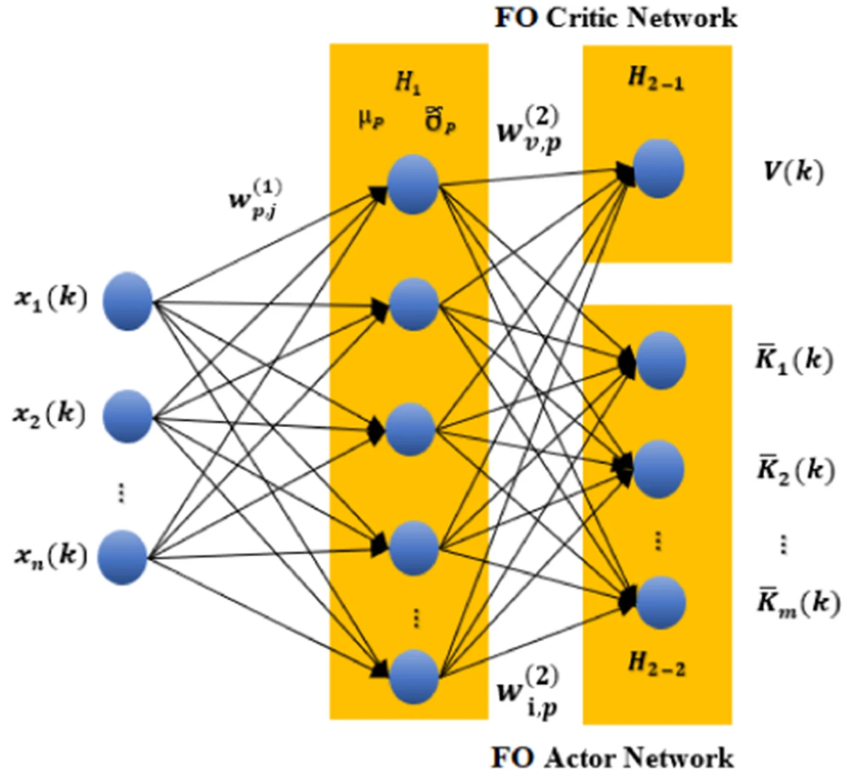
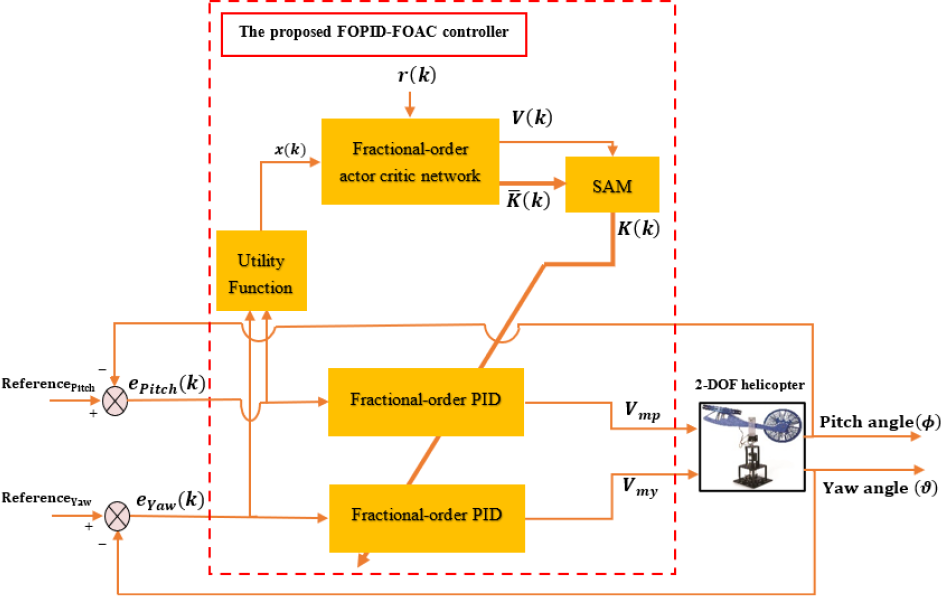
Optimal Fractional-Order PID Controller based on Fractional-Order Actor-Critic Algorithm
Abstract This project proposes an online optimization approach for a fractional-order PID controller using a fractional-order actor-critic algorithm (FOPID-FOAC), aiming to enhance the performance of nonlinear systems. The FOPID-FOAC scheme combines the advantages of fractional-order PID controllers and actor-critic reinforcement learning algorithms. The proposed FOAC algorithm employs fractional
Research Project
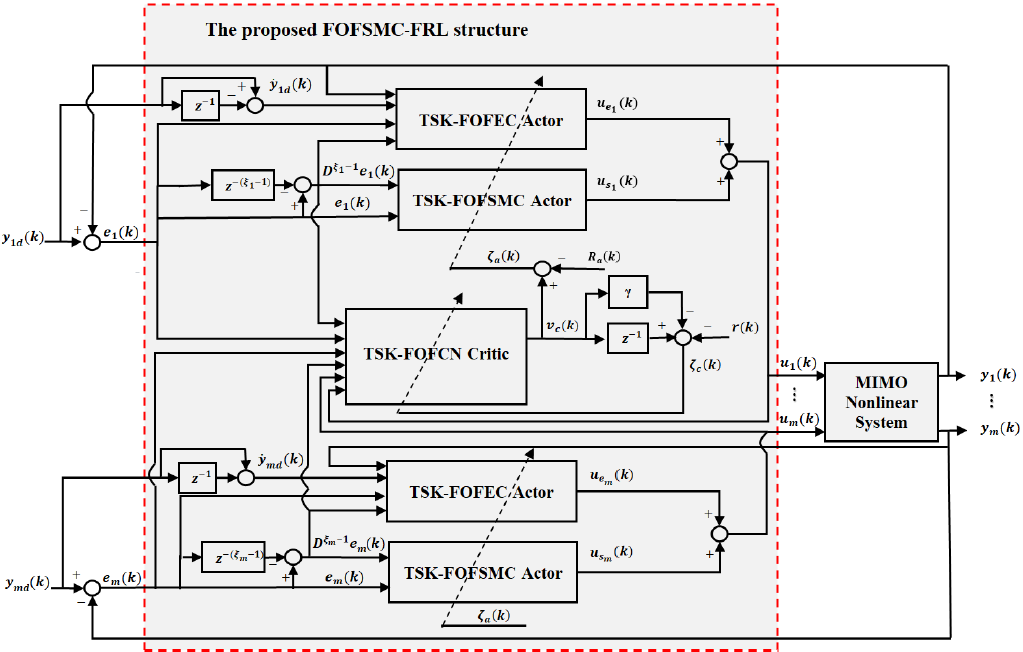
Fractional-order Fuzzy Sliding Mode Control of Uncertain Nonlinear MIMO Systems Using Fractional-order Reinforcement Learning
Abstract This project presents a novel approach to enhance the control performance of unknown multiple-input and multiple-output (MIMO) nonlinear systems. The proposed method integrates a fractional-order fuzzy sliding mode controller with online fractional-order reinforcement learning (FOFSMC-FRL). The controller utilizes two Takagi–Sugeno–Kang (TSK) fuzzy neural network actors to approximate the
Research Project
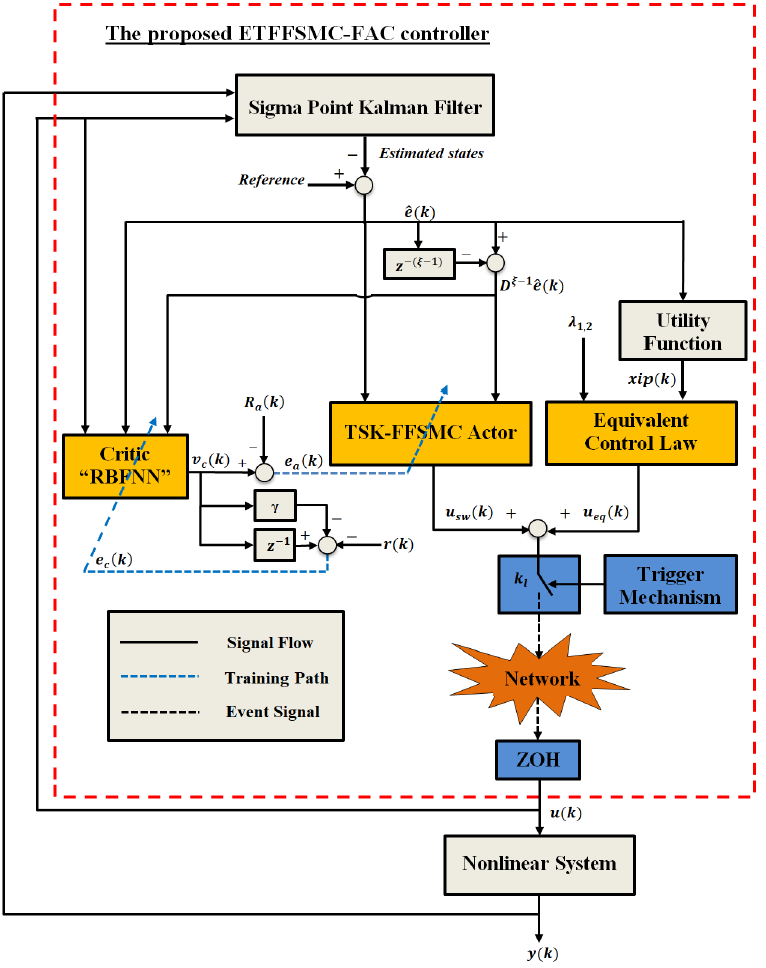
Observer-Based Adaptive Event-Triggered Fractional-Order Sliding Mode Control Using Online Fractional-Order Learning Approach
Abstract This project introduces an innovative adaptive event-triggered control strategy (ETS) for networked uncertain nonlinear systems with unmeasured states. The proposed method, called ETFFSMC-FAC, combines a fractional-order fuzzy sliding mode controller with a fractional-order actor-critic (FAC) approach. Initially, unmeasured states are estimated using a sigma-point Kalman filter (SKF)