Experimental verification of a hybrid control scheme with chaotic whale optimization algorithm for nonlinear gantry crane: A comparative study
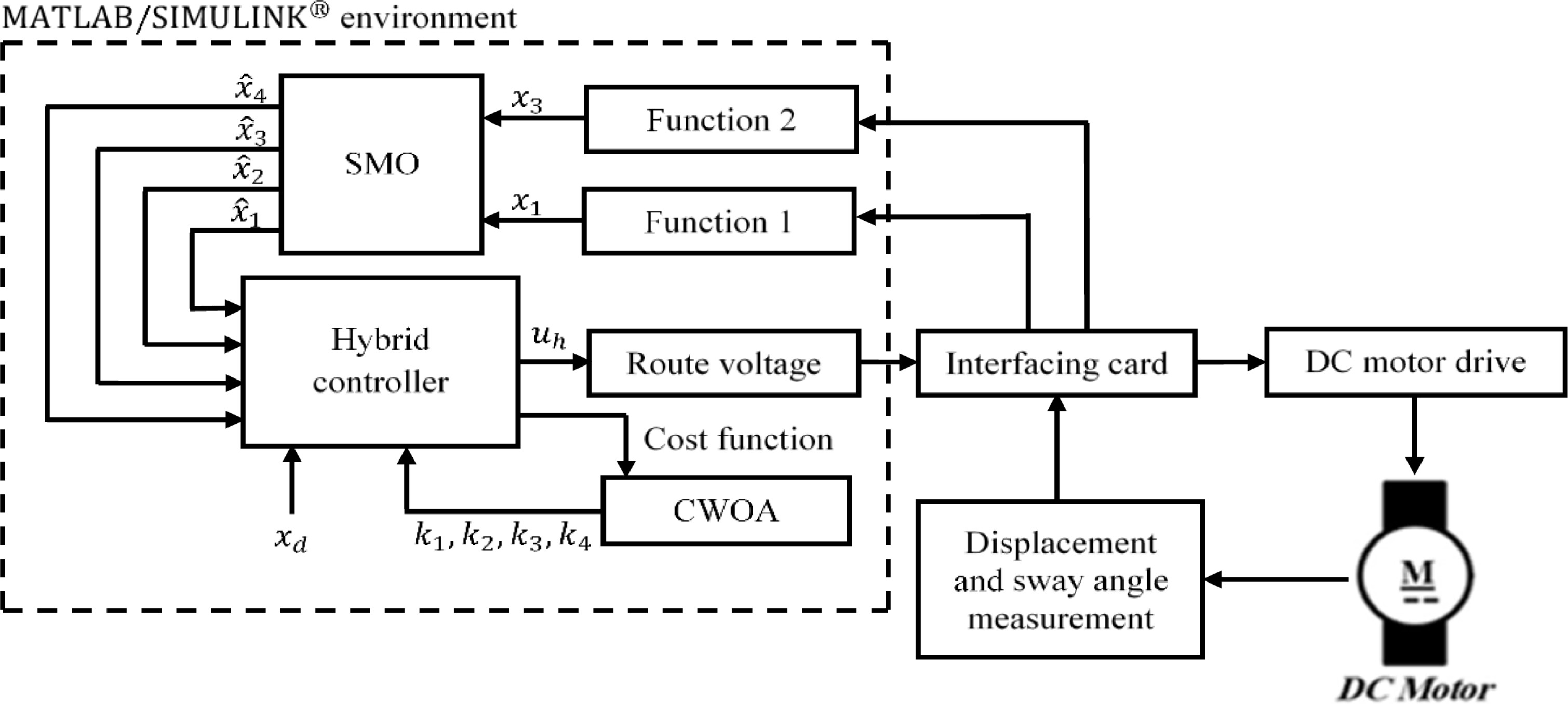
This paper proposes an experimental verification of a hybrid partial feedback linearization (PFL) and deadbeat (DB) control scheme as in Hamdy et al. (2018) with chaotic whale optimization algorithm (CWOA) for a nonlinear gantry crane (GC) system. The PFL linearizes the nonlinear model to end up with a linear closed-loop system. The DB controller is utilized for the desirable accelerated response without any oscillation or undesirable effects on the internal dynamics stability. The CWOA is used to tune the controller parameters. A sliding-mode observer (SMO) is utilized to estimate the unmeasured states. Using this hybrid scheme, a better payload sway elimination can be obtained. Finally, the experimental results are presented to illustrate the efficiency and the effectiveness of the proposed scheme with a comparative study. © 2019 ISA
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments