Modeling of Nonlinear Enhanced Air Levitation System using NARX Neural Networks
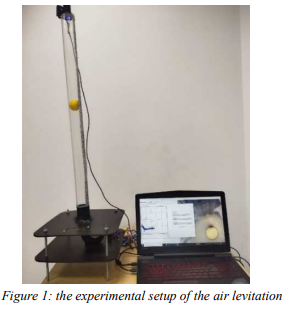
the proposed paper aims to design and model an air levitation system, which is a highly nonlinear system because of its fast dynamics and low damping. The system is trained using a Nonlinear Autoregressive model with exogenous input (NARX model). An enhanced height measurement system, modified setup, and several training techniques have been used to overcome the restrictions that the non-linearity of the system imposes in the literature. The system mathematical model has been illustrated, followed by an identified model using NARX model trained on several input-output data from the physical setup, which led to perfectly define the unknown parameters of the system. The data is collected using a closed-loop identification implemented using a Python-Arduino-linked GUI vision system, and the results were remarkable when compared to the literature setup. The results verify that NARX neural network, with suitable training procedures, could successfully model a real air levitation system. © 2021 IEEE.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments