


Publications
Publications
Filter by
ETHICS-2023 Session C2 - Panel: Socially responsible innovation for climate change mitigation and adaptation: Sponsored by IEEE Technical Activities Board Climate Change Program
[No abstract available]
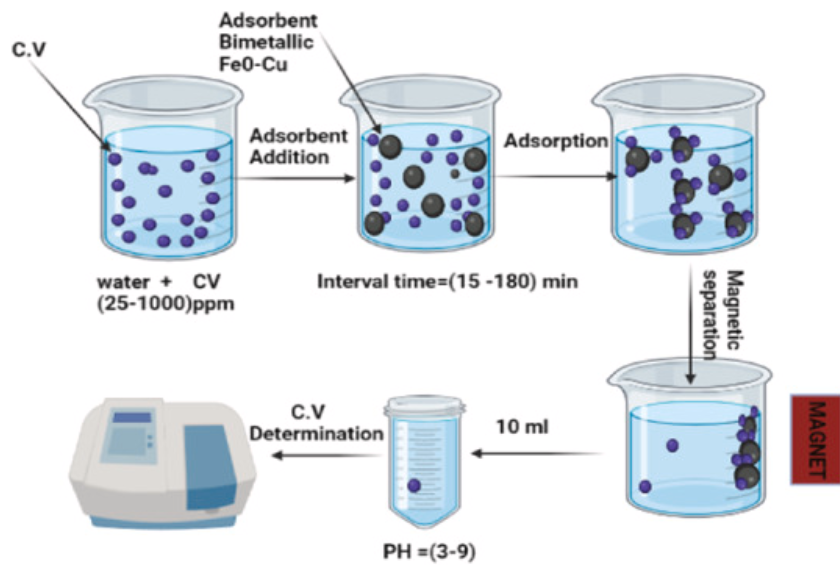
Crystal violet removal using bimetallic Fe0–Cu and its composites with fava bean activated carbon
Nano zero-valent iron (nZVI), bimetallic nano zero-valent iron-copper (Fe0– Cu), and fava bean activated carbon-supported bimetallic nano zero-valent iron-copper (AC-Fe0-Cu) are synthesized and characterized using DLS, zeta potential, FT-IR, XRD, and SEM. The maximum removal capacity is demonstrated by bimetallic Fe0–Cu, which is estimated at 413.98 mg/g capacity at pH 7, 180 min of contact
Review on Coral Reef Regeneration Methods through Renewable Powered Electrotherapy
The restoration of coral reef population in coastal regions is currently a growing concern. Many attempts have been made to apply new approaches to limit the deterioration of coral reefs, and to accelerate the growth of new reefs to protect coastal areas and ecosystems using available renewable energy sources. This paper highlights the new approaches and their various advantages and limitations in
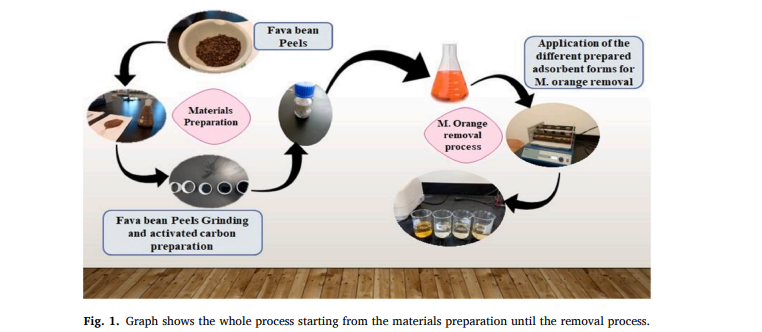
Experimental investigation of methyl-orange removal using eco-friendly cost-effective materials raw fava bean peels and their formulated physical, and chemically activated carbon
The discharge of effluents from dye industries into water streams poses a significant environmental and public health risk. In response, eco-friendly adsorbents derived from agricultural waste, such as Fava Bean Peels (R–FBP), have been investigated as potential materials for the removal of such pollutants. In this study, R–FBP and their corresponding physical and chemically activated carbon (P
Hybrid Global Optimization Algorithm for Feature Selection
This paper proposes Parallelized Linear Time-Variant Acceleration Coefficients and Inertial Weight of Particle Swarm Optimization algorithm (PLTVACIW-PSO). Its designed has introduced the benefits of Parallel computing into the combined power of TVAC (Time-Variant Acceleration Coefficients) and IW (Inertial Weight). Proposed algorithm has been tested against linear, non-linear, traditional, and
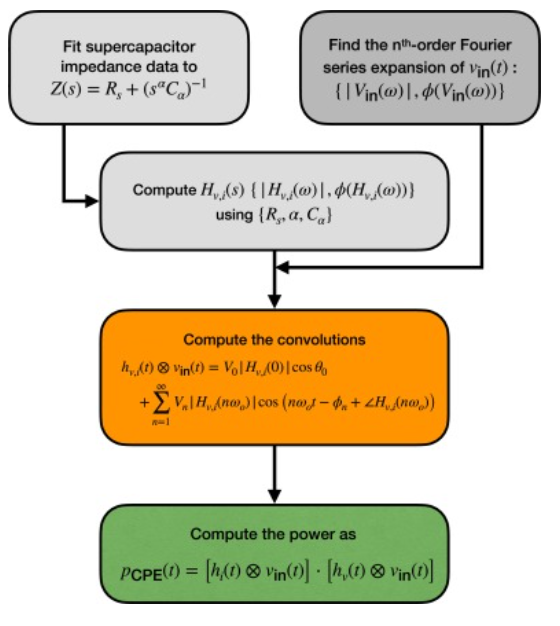
Time-domain response of supercapacitors using their impedance parameters and Fourier series decomposition of the excitation signal
Supercapacitors are mostly recognized for their high power density capabilities and fast response time when compared to secondary batteries. However, computing their power in response to a given excitation using the standard formulæof capacitors is misleading and erroneous because supercapacitors are actually non-ideal capacitive devices that cannot be characterized with a single constant
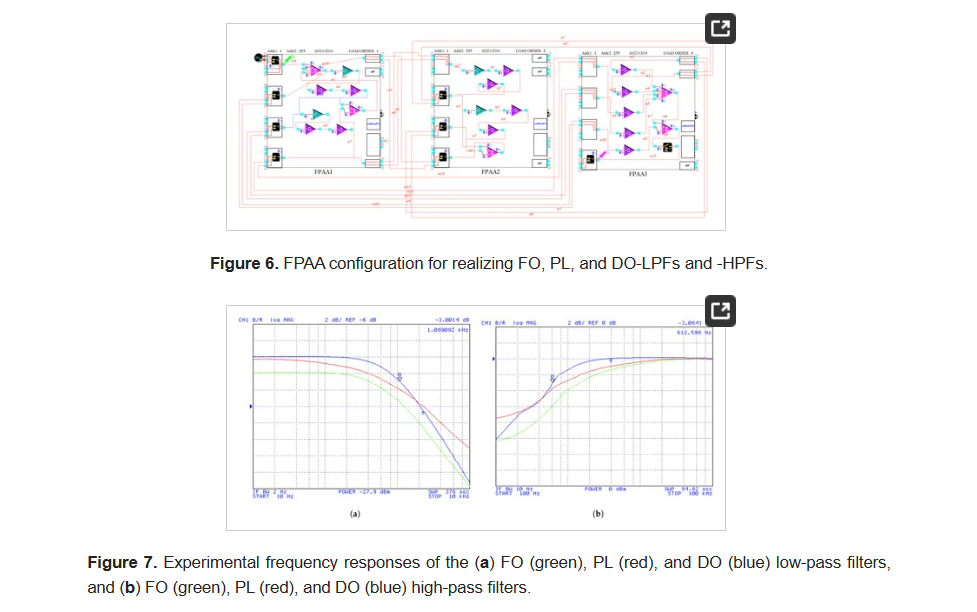
Field Programmable Analog Array Based Non-Integer Filter Designs
The approximation of the frequency behavior of fractional-order, power-law, and double-order filters can be performed by the same rational integer-order transfer function. This can be achieved through the utilization of a curve fitting based approximation. Moreover, their implementation can be performed by the same core, by only changing the corresponding time constants and scaling factors. The
Ternary SRAM circuit designs with CNTFETs
Static random-access memory (SRAM) is a cornerstone in modern microprocessors architecture, as it has high power consumption, large area, and high complexity. Also, the stability of the data in the SRAM against the noise and the performance under the radian exposure are main concern issues. To overcome these limitations in the quest for higher information density by memory element, the ternary
Bowtie-Shaped Plasmonic Nanoparticles-Enhanced Photovoltaic Anti-Reflective Coating
Light trapping is a promising technique that enhances sunlight absorption by solar cells. This paper presents a study of bow-tie-shaped nanoparticles embedded in the antireflection coating of photovoltaic solar cells, which enhances the optical transmission of the photovoltaic surface. Therefore, the optical path length for light penetration is increased through the semiconductor active layer
COVID-19 Diagnosis from CT-images Using Transfer Learning
In symptomatic patients, a positive COVID-19 test is critical for securing life-saving services such as ICU care and ventilator support; it may cause septic shock, septic pneumonia, respiratory failure, heart difficulties, liver issues, and even death. CAD systems help people in rural places and doctors in the early detection of COVID-19. A diagnostic and severity detection technique utilizing