


Software and Communications
Code Smells and Detection Techniques: A Survey
Design and code smells are characteristics in the software source code that might indicate a deeper design problem. Code smells can lead to costly maintenance and quality problems, to remove these code smells, the software engineers should follow the best practices, which are the set of correct techniques which improve the software quality. Refactoring is an adequate technique to fix code smells, software refactoring modifies the internal code structure without changing its functionality and suggests the best redesign changes to be performed. Developers who apply correct refactoring sequences
Cloud computing security: Challenges & future trends
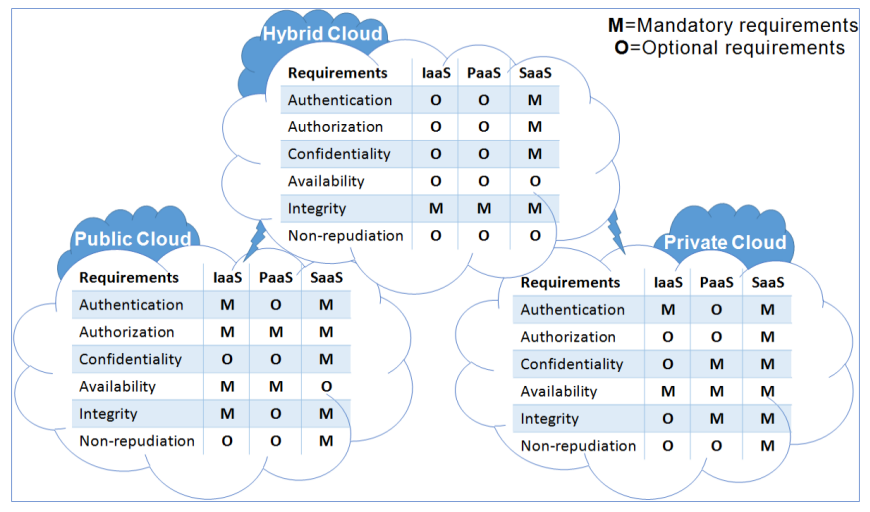
Cloud computing is one of the most trendy terminologies. Cloud providers aim to satisfy clients' requirements for computing resources such as services, applications, networks, storage and servers. They offer the possibility of leasing these resources rather than buying them. Many popular companies, such as Amazon, Google and Microsoft, began to enhance their services and apply the technology of cloud computing to provide cloud environment for their customers. Although there are lots of advantages in using a cloud-based system, some issues must be handled before organisations and individuals
NONYM!ZER: Mitigation Framework for Browser Fingerprinting
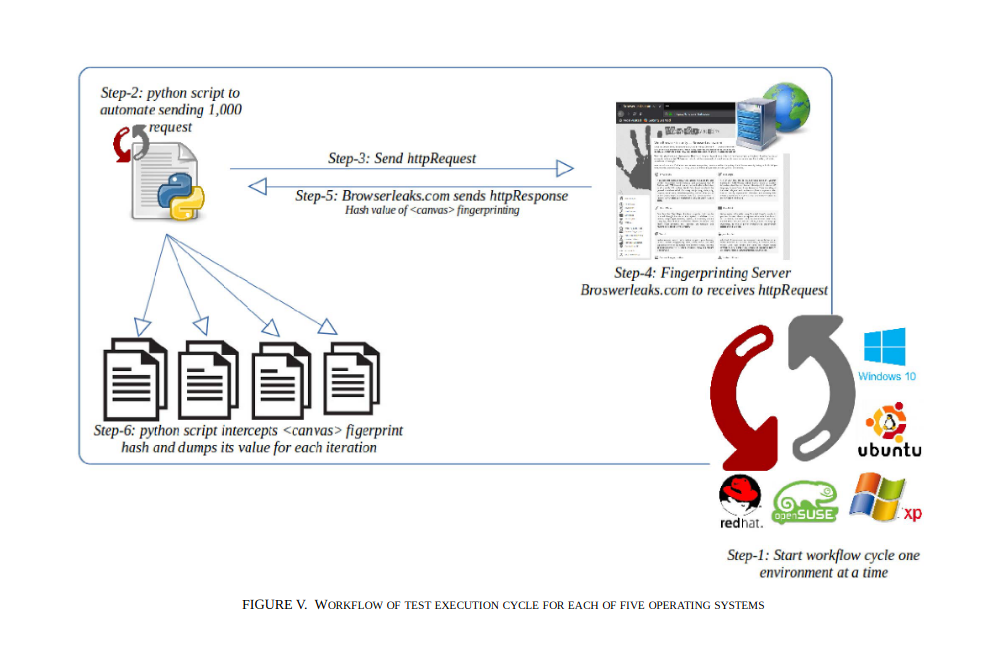
Not only recent compelled cookies regulations have radically restrained their threats but also increased people awareness has played a fundamental part. This has placed huge pressure on enterprises to find alternatives to bridge this gap and satisfy business demands. Since then fingerprinting has gained enormous popularity. In this paper, we introduce 'nonym!zer' as a mitigation framework for browser fingerprinting. It helps to hinder or impede browser fingerprinting on desktop browsers that web servers use such as WebGL or Canvas technologies. © 2019 IEEE.
Browsers fingerprinting motives, methods, and countermeasures
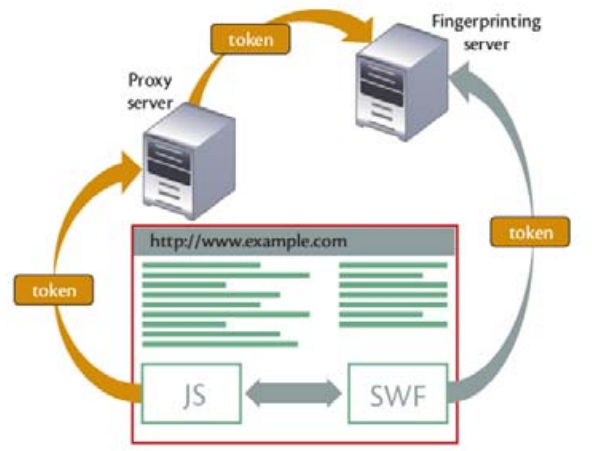
With the continuous and aggressive competition in advertising businesses, uncontrollably desires have emerged to identify and classify consumers. It is proven that companies must have a clear definition of its target market. Based on this we have seen different ways to identify, analyze, and track consumers, either voluntarily or without their consent. Browser fingerprinting techniques have evolved from being privacy-friendly to privacy intrusive to serve these demands. This also has pushed privacy concerned people to save no effort to advance countermeasures. In this paper we introduce
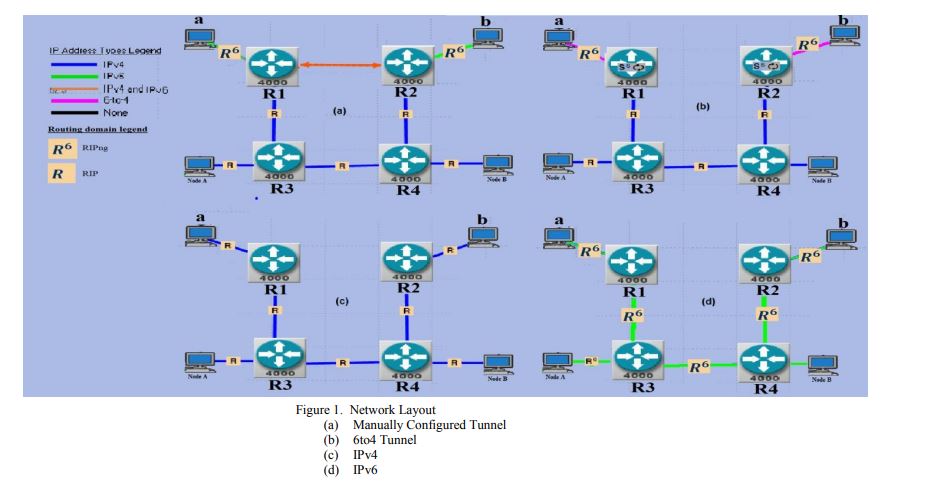
Convergence study of IPv6 tunneling techniques
IPv4 address exhaustion pushed IETF to create IPv6, the improved substitute of IPv4. The Internet complexity and its enormous size prolong the transition from IPv4 to IPv6 process. This means that both versions will necessarily co-exist. Meanwhile, tunneling appears as a solution trend. The tunneling is a transition technique that is considered temporary till all ISPs would support IPv6. At this paper, we compare the routing convergence of two tunnel types, 6to4 and Manually Configured versus the conventional IPv4 and IPv6 protocols. We analyze the network resources consumed during cold start
ITS navigation and live timetables for the blind based on RFID robotic localization algorithms and ZigBee broadcasting
This paper tries to alleviate some challenges facing blind and visually impaired people in public transportation systems by providing them with in-station navigation information and real-time schedule information. Novel system architecture for the Intelligent Transportation Systems (ITS) navigation for blind and visually impaired people based on recent Radio Frequency Identification (RFID) localization technologies, commonly used in robotics, is proposed. Furthermore, a live timetable using a new ZigBee network broadcasting protocol with detailed frame structure is used for provision of real
Remote prognosis, diagnosis and maintenance for automotive architecture based on least squares support vector machine and multiple classifiers
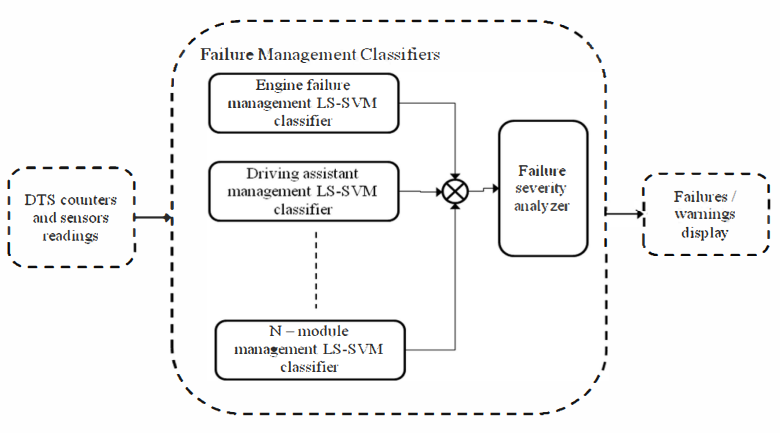
Software issues related to automotive controls account for an increasingly large percentage of the overall vehicles recalled. To alleviate this problem, vehicle diagnosis and maintenance systems are increasingly being performed remotely, that is while the vehicle is being driven without need for factory recall and there is strong consumer interest in Remote Diagnosis and Maintenance (RD&M) systems. Such systems are developed with different building blocks/elements and various capabilities. This paper presents a novel automotive RD&M system and prognosis architecture. The elements of the

Automated cardiac-tissue identification in composite strain-encoded (C-SECN) images using fuzzy K-means and bayesian classifier
Composite Strain Encoding (C-SENC) is an MRI acquisition technique for simultaneous acquisition of cardiac tissue viability and contractility images. It combines the use of black-blood delayed-enhancement imaging to identify the infracted (dead) tissue inside the heart wall muscle and the ability to image myocardial deformation (MI) from the strain-encoding (SENC) imaging technique. In this work, we propose an automatic image processing technique to identify the different heart tissues. This provides physicians with a better clinical decision-making tool in patients with myocardial infarction
Multimodal Video Sentiment Analysis Using Deep Learning Approaches, a Survey
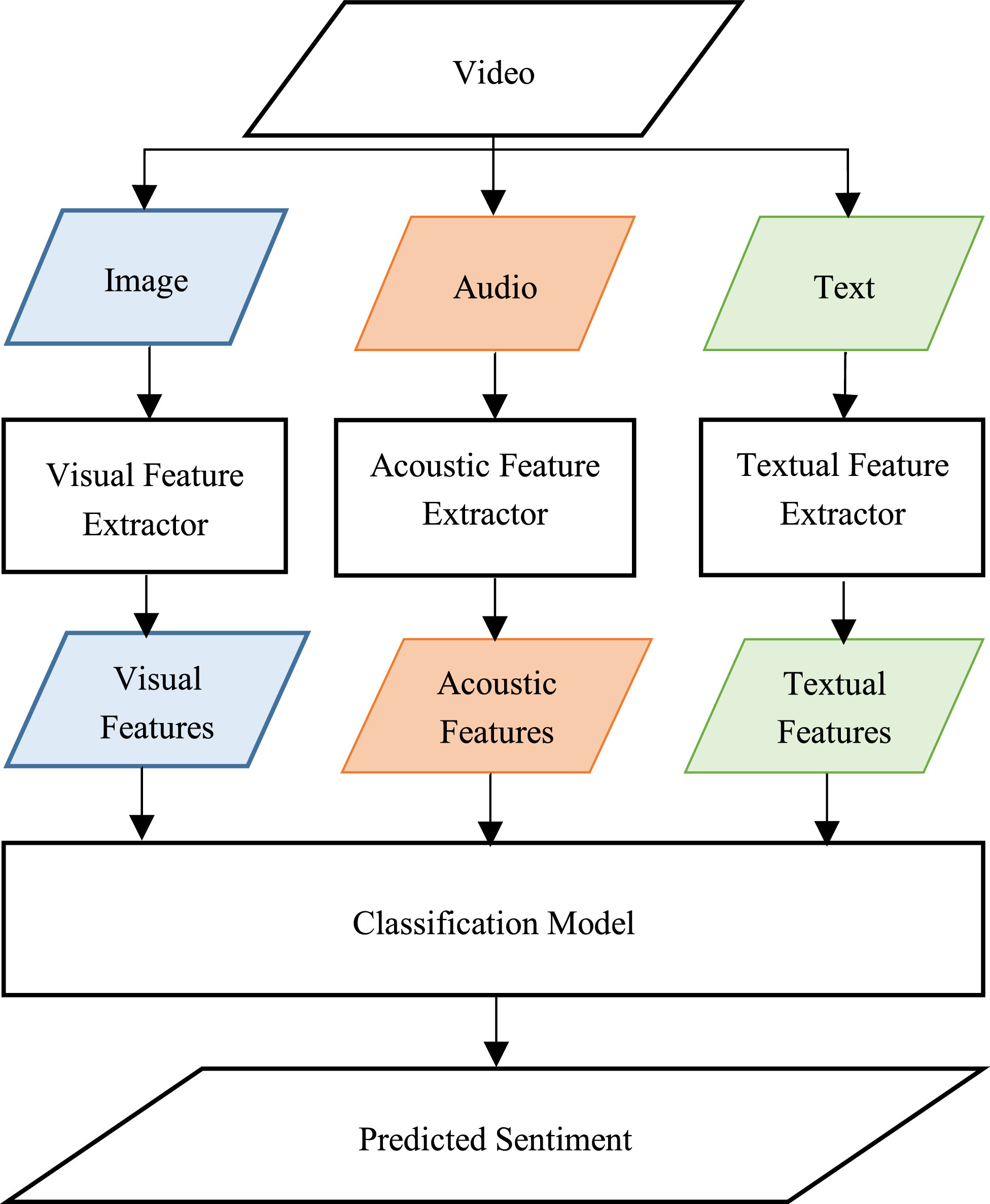
Deep learning has emerged as a powerful machine learning technique to employ in multimodal sentiment analysis tasks. In the recent years, many deep learning models and various algorithms have been proposed in the field of multimodal sentiment analysis which urges the need to have survey papers that summarize the recent research trends and directions. This survey paper tackles a comprehensive overview of the latest updates in this field. We present a sophisticated categorization of thirty-five state-of-the-art models, which have recently been proposed in video sentiment analysis field, into

Investigating analysis of speech content through text classification
The field of Text Mining has evolved over the past years to analyze textual resources. However, it can be used in several other applications. In this research, we are particularly interested in performing text mining techniques on audio materials after translating them into texts in order to detect the speakers' emotions. We describe our overall methodology and present our experimental results. In particular, we focus on the different features selection and classification methods used. Our results show interesting conclusions opening up new horizons in the field, and suggest an emergence of