


Circuit Theory and Applications
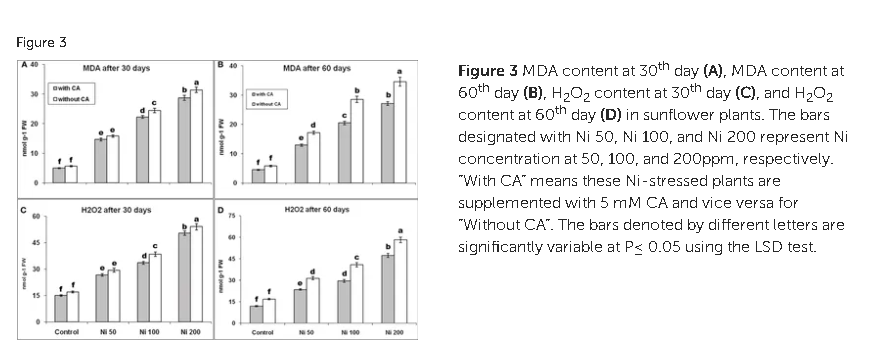
Citric acid assisted phytoextraction of nickle from soil helps to tolerate oxidative stress and expression profile of NRAMP genes in sunflower at different growth stages
Introduction: Soil polluted with Nickel (Ni) adversely affects sunflower growth resulting in reduced yield. Counterbalancing Ni toxicity requires complex molecular, biochemical, and physiological mechanisms at the cellular, tissue, and whole plant levels, which might improve crop productivity. One of the primary adaptations to tolerate Ni toxicity is the enhanced production of antioxidant enzymes and the elevated expression of Ni responsive genes. Methods: In this study, biochemical parameters, production of ROS, antioxidants regulation, and expression of NRAMP metal transporter genes were
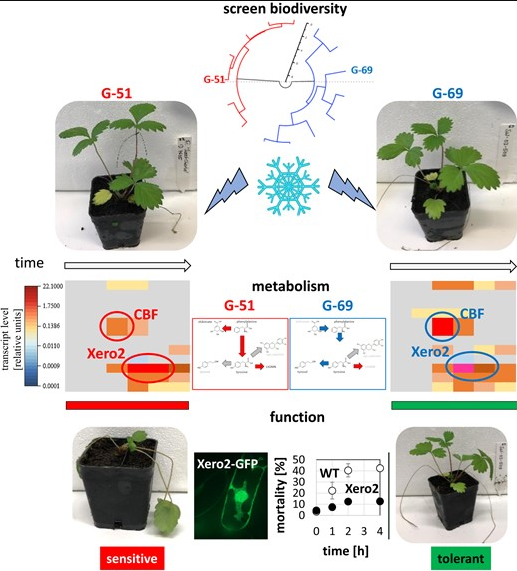
Cold tolerance of woodland strawberry (Fragaria vesca) is linked to Cold Box Factor 4 and the dehydrin Xero2
Domesticated strawberry is susceptible to sudden frost episodes, limiting the productivity of this cash crop in regions where they are grown during early spring. In contrast, the ancestral woodland strawberry (Fragaria vesca) has successfully colonized many habitats of the Northern Hemisphere. Thus, this species seems to harbour genetic factors promoting cold tolerance. Screening a germplasm established in the frame of the German Gene Bank for Crop Wild Relatives, we identified, among 70 wild accessions, a pair with contrasting cold tolerance. By following the physiological, biochemical
DiDBiT-TMT: A Novel Method to Quantify Changes in the Proteomic Landscape Induced by Neural Plasticity
Direct detection of biotinylated proteins (DiDBiT) is a proteomic method that can enrich and detect newly synthesized proteins (NSPs) labeled with bio-orthogonal amino acids with 20-fold improved detectability compared to conventional methods. However, DiDBiT has currently been used to compare only two conditions per experiment. Here, we present DiDBiT-TMT, a method that can be used to quantify NSPs across many conditions and replicates in the same experiment by combining isobaric tandem mass tagging (TMT) with DiDBiT. We applied DiDBiT-TMT to brain slices to determine changes in the de novo
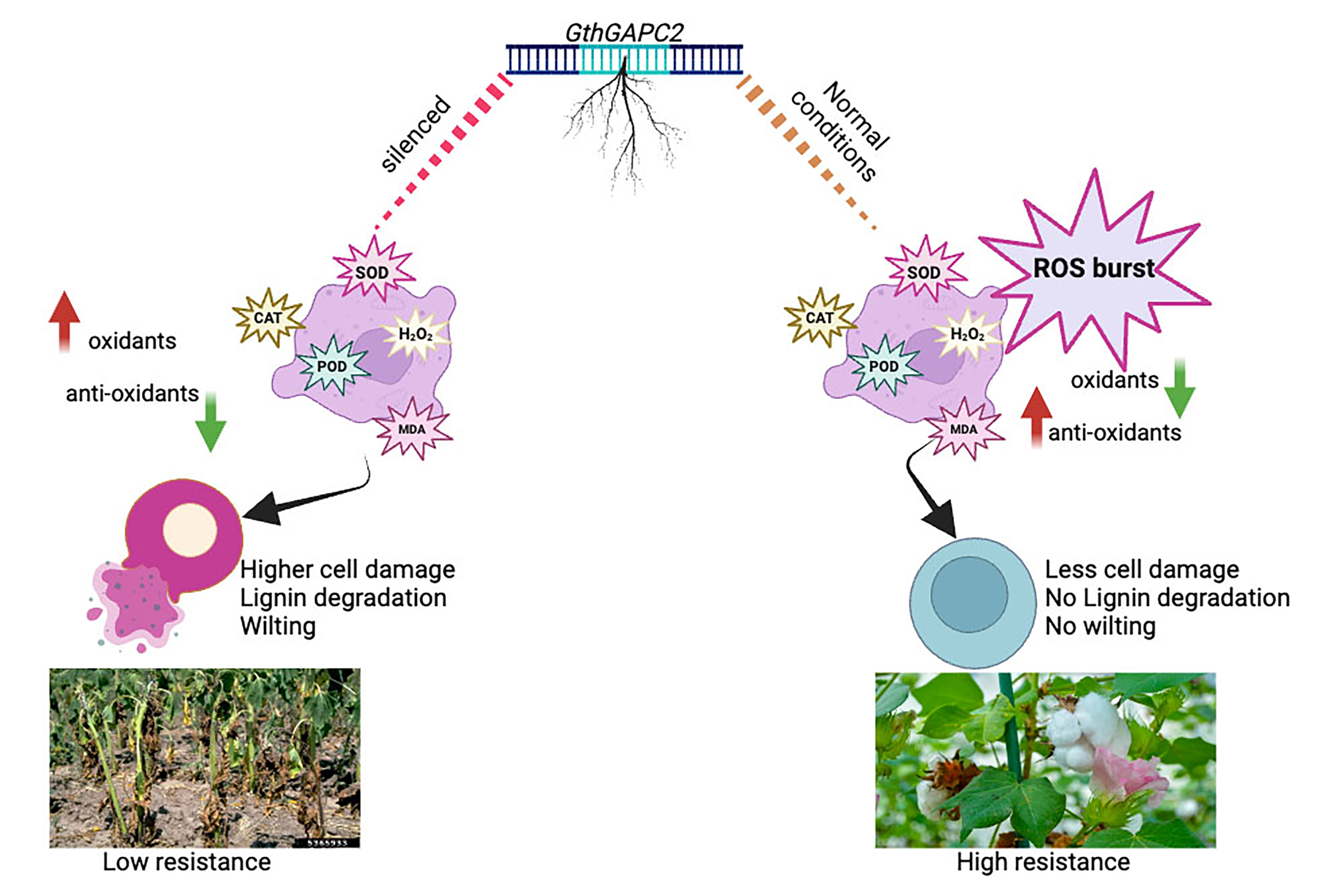
Unravelling the Functional Role of GthGAPC2 in Cotton's Defense Against Verticillium dahliae through Proteome
Cotton (Gossypium spp.) is an economically important crop, but its productivity is often hindered by the soil-borne pathogen Verticillium dahliae. This study aimed to investigate the response of cotton roots to V. dahliae infection by analysing the proteome of Gossypium thurberi (resistant) and Gossypium raimondii (susceptible) at 0 h, 24 h, and 48 h post-infection. Through weighted protein coexpression network analysis, fifteen hub proteins crucial for defense against V. dahliae were identified. Expression analysis revealed the pivotal role of GthGAPC2, encoding GLYCERALDEHYDE-3-PHOSPHATE

Facile sonochemically-assisted bioengineering of titanium dioxide nanoparticles and deciphering their potential in treating breast and lung cancers: biological, molecular, and computational-based investigations
Combining sonochemistry with phytochemistry is a modern trend in the biosynthesis of metallic nanoparticles (NPs), which contributes to the sustainability of chemical processes and minimizes hazardous effects. Herein, titanium dioxide (TiO2) NPs were bioengineered using a novel and facile ultrasound-assisted approach utilizing the greenly extracted essential oil of Ocimum basilicum. FTIR and UV-Vis spectrophotometry were used to confirm the formation of TiO2 NPs. The X-ray diffraction (XRD) analysis showed the crystalline nature of TiO2 NPs. TEM analysis revealed the spherical morphology of
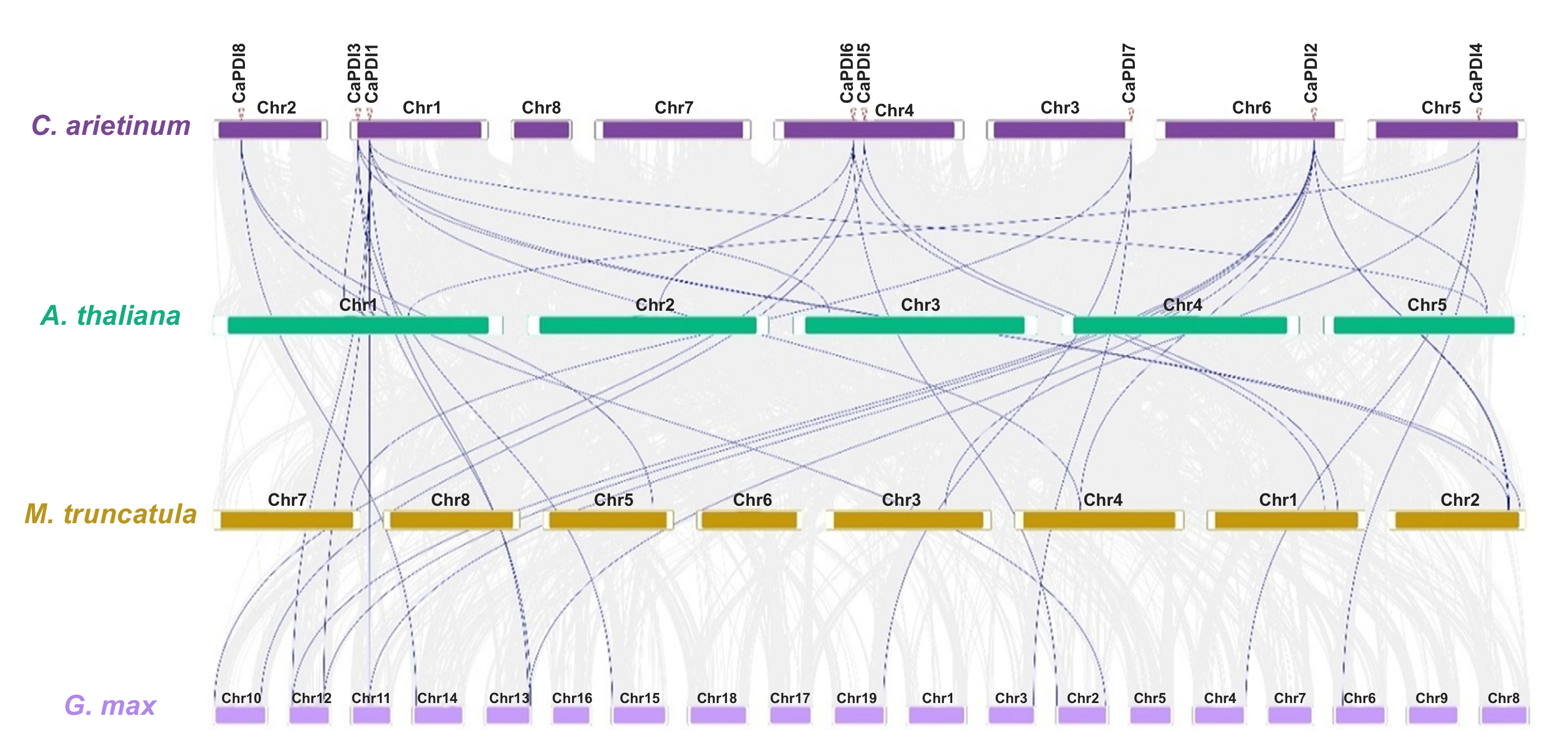
Genome-wide analysis and expression divergence of protein disulfide isomerase (PDI) gene family members in chickpea (Cicer arietinum) under salt stress
Chickpea (Cicer arietinum) is a grain crop that is an important source of protein, vitamins, carbohydrates and minerals. It is highly sensitive to salt stress, and salt damage to cellular homeostasis and protein folding affects production. Plants have several mechanisms to prevent cellular damages under abiotic stresses, such as proteins in the endoplasmic reticulum (protein isulfide somerases (PDIs) and PDI-like proteins), which help prevent the build-up of mis-folded proteins that are damaged under abiotic stresses. In this study, we completed initial comprehensive genome-wide analysis of
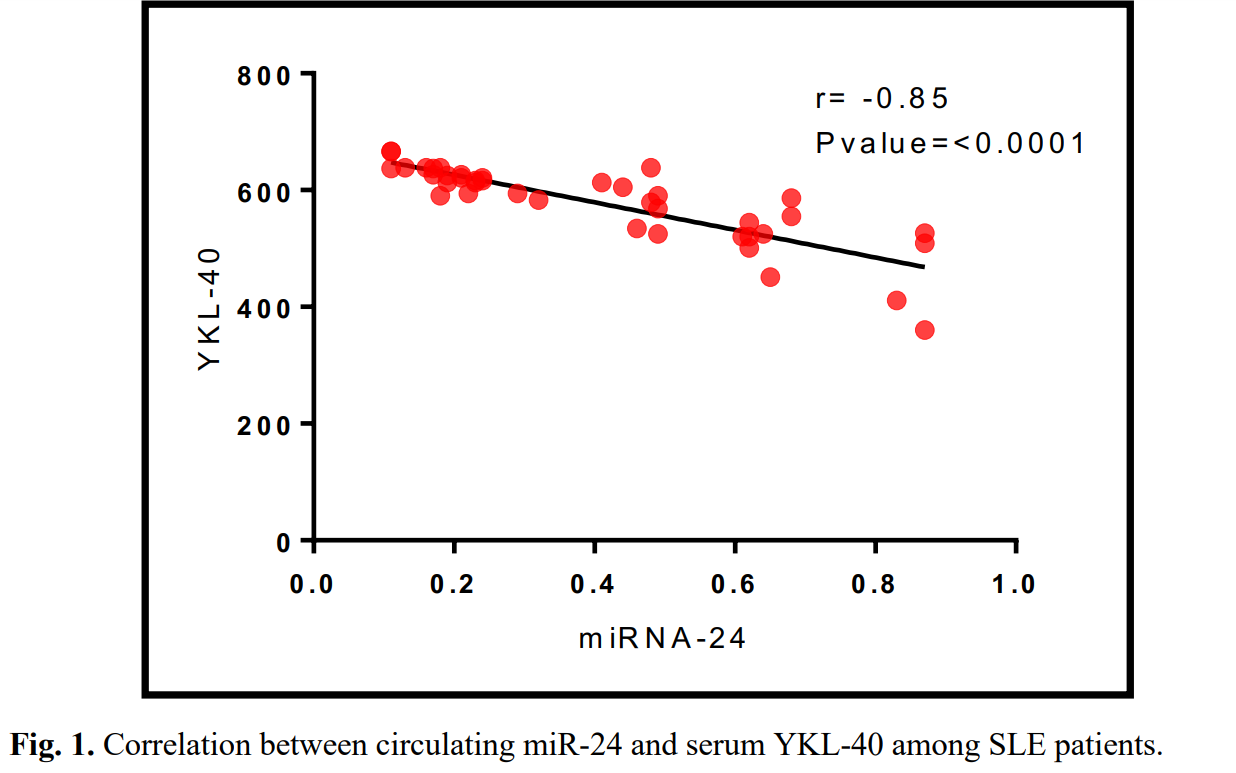
Can Micro RNA-24 Affect the Cardiovascular Morbidity in Systemic Lupus Erythematosus by Targeting YKL-40?
Background: Systemic lupus erythematosus (SLE) is an autoimmune disease with inflammatory nature. One of the leading causes of death in SLE patients is cardiovascular (CVS) morbidity. MiRNA-24 is highly expressed in vascular endothelial cells (VECs). This dysregulated expression pattern is associated with dysfunction or even damage of VECs and leads to the occurrence of cardiovascular diseases. YKL-40 is an inflammatory glycoprotein involved in the pathogenesis of endothelial dysfunction and thereby atherosclerosis. In this work, we aimed at illustrating the possible role of miR-24 and its
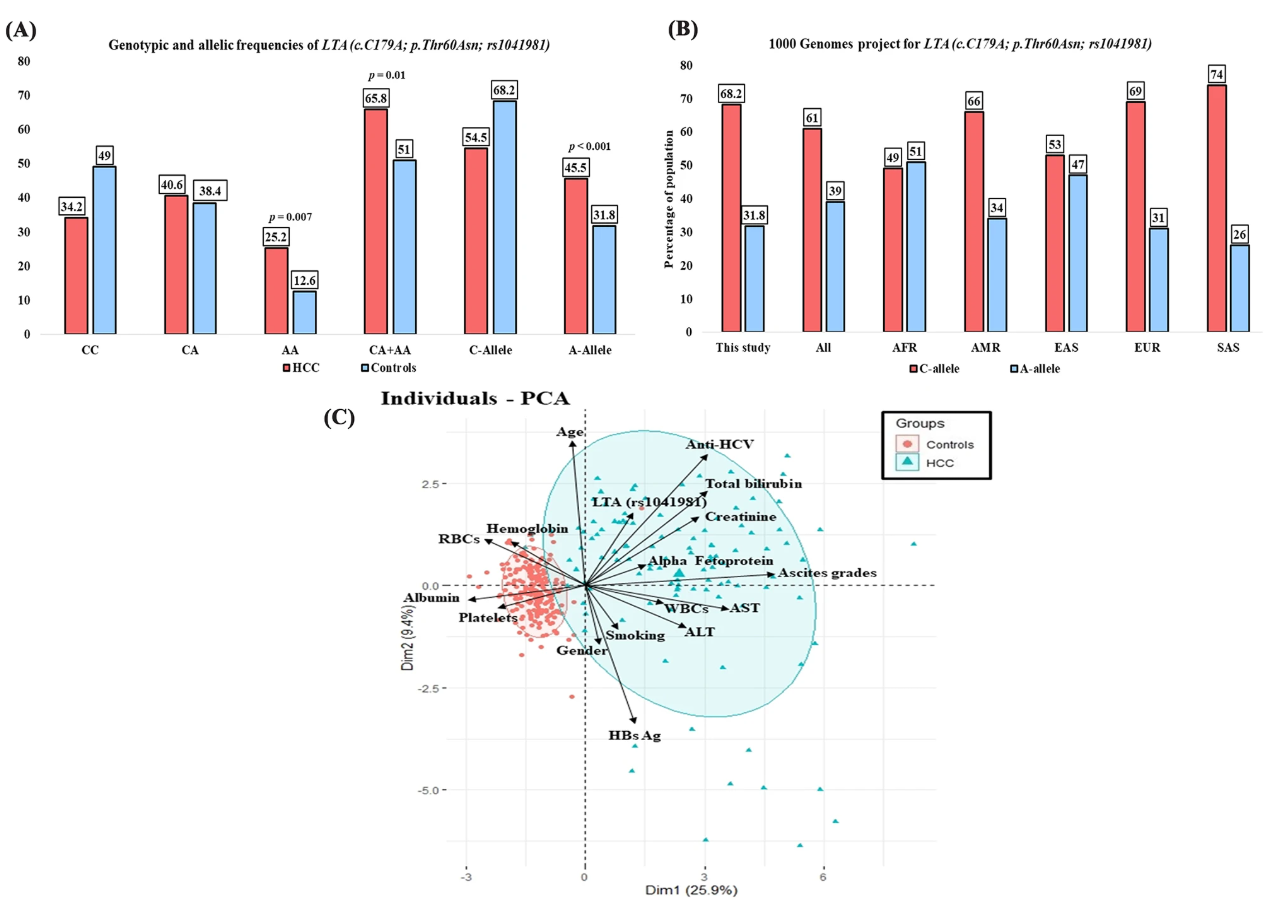
Prognostic significance of the genetic variant of lymphotoxin alpha (p.Thr60Asn) in egyptian patients with advanced hepatocellular carcinoma
Background: Hepatocellular carcinoma (HCC) is one of the most common malignancies worldwide in terms of mortality, and susceptibility is attributed to genetic, lifestyle, and environmental factors. Lymphotoxin alpha (LTA) has a crucial role in communicating the lymphocytes with stromal cells and provoking cytotoxic effects on the cancer cells. There are no reports on the contribution of the LTA (c.179 C>A; p.Thr60Asn; rs1041981) gene polymorphism to HCC susceptibility. The main aim of this study is to investigate the association of LTA (c.179 C>A; p.Thr60Asn; rs1041981) variant with the HCC
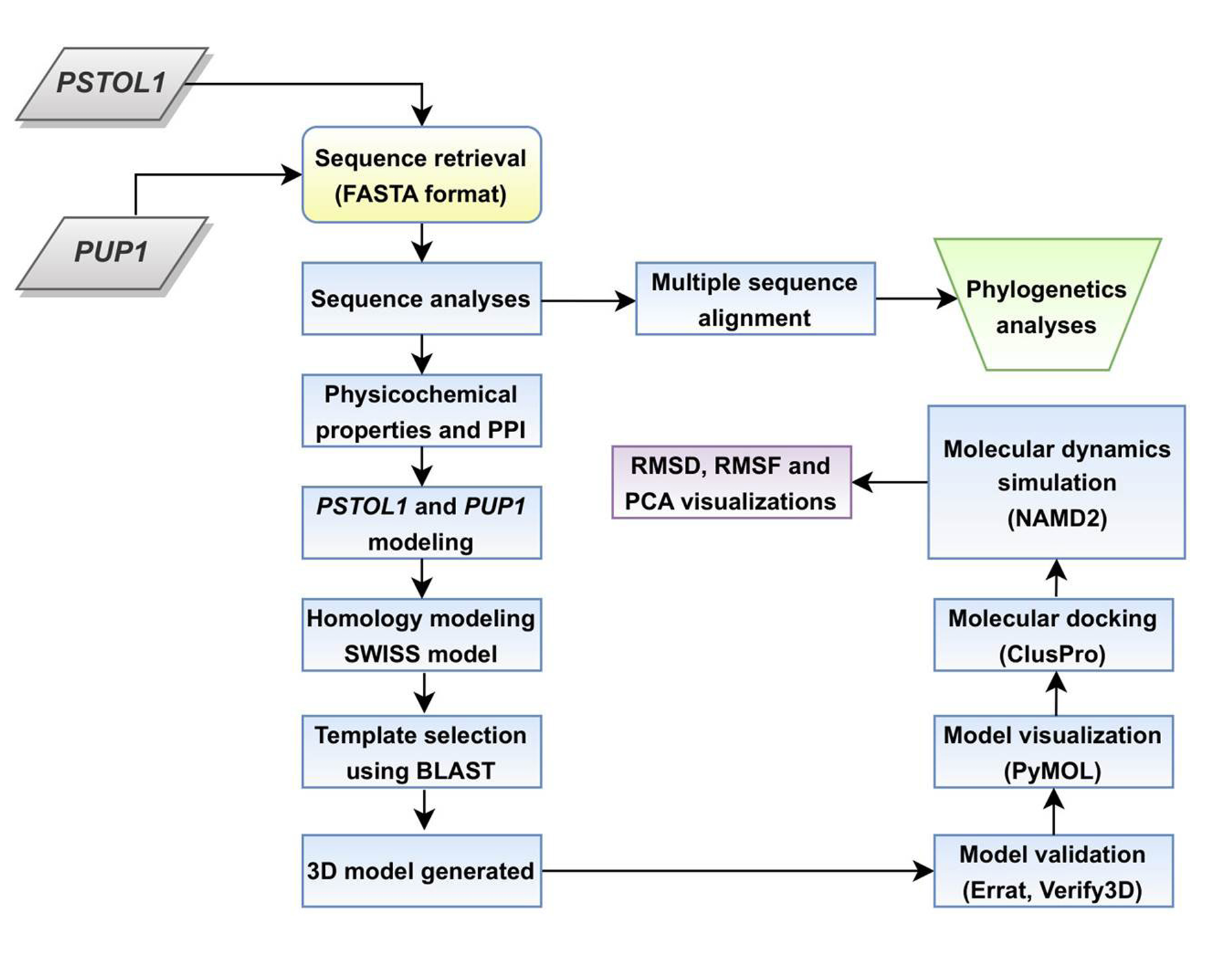
In silico analysis of the structural and functional characterization of the phosphorus-starvation tolerance 1 (PSTOL1) gene
As an important macro element for all living cells, phosphorus is essential in agricultural production systems and is required in large quantities by elite varieties of crops to maintain yields. Approximately 70% of the worldwide cultivated land suffers from phosphorous deficiency, and it has recently been estimated that the worldwide phosphorous resources will be shattered by the end of this century, thereby increasing the need to develop phosphorus-efficient crops. A greater understanding of how plants can maintain yield with lower phosphorous availability is highly desirable to both
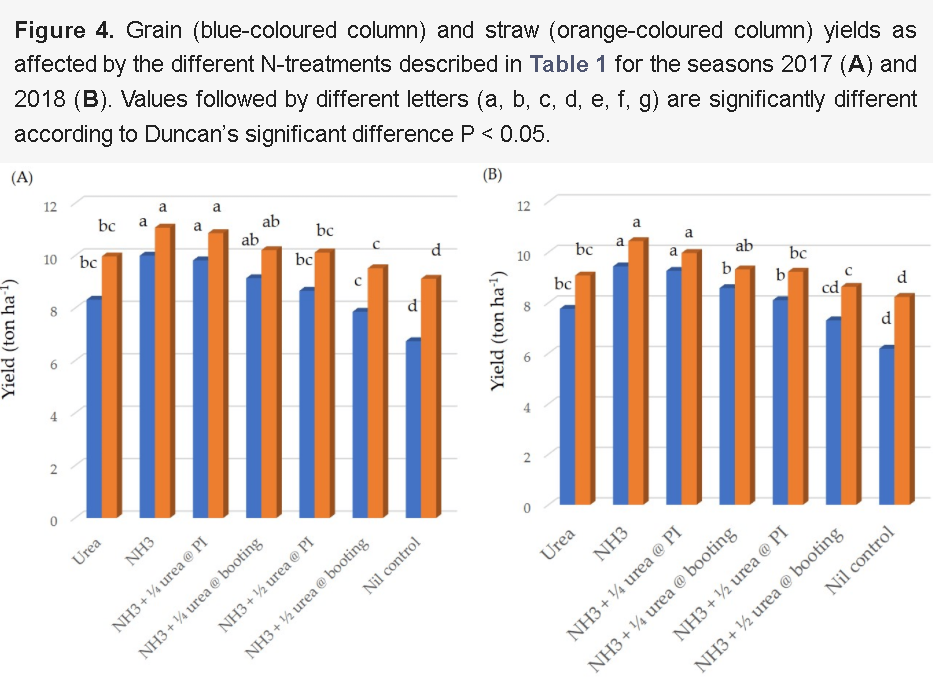
Injected Anhydrous Ammonia Is More Effective Than Broadcast Urea as a Source of Nitrogen for Drill Seeded Rice
Anhydrous ammonia is a cheaper source of nitrogen (N) fertiliser than granular urea for rice production, but it is not widely used in developing countries. It can only be applied pre-crop with any in-crop applications being applied in the form of urea. This 2-year study conducted in the Nile delta region of Egypt compared pre-crop anhydrous ammonia injected to a depth of 20 cm with broadcast urea as N sources for rice, along with 4 combinations of pre-crop ammonia and in-crop urea. Each treatment supplied a total of 165 kg N/ha. The rice crop was direct seeded rather than transplanted. The