


Journal
Realizations of fractional-order PID loop-shaping controller for mechatronic applications
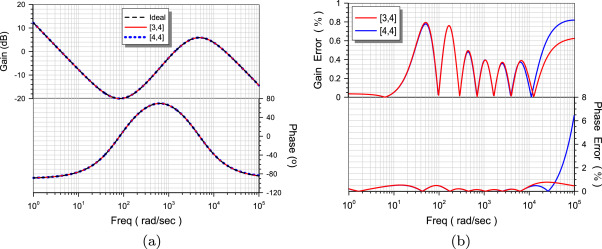
A novel procedure for the realization of a fractional-order PID loop-shaping controller, suitable for precision control of mechatronic systems, is introduced in this work. Exploiting appropriate tools, the controller function is approximated as a whole, leading to a simple form of integer-order approximation, when compared to the case where each intermediate part of the PID transfer function is approximated. This leads to a direct implementation, composed of conventional active and passive elements. Simulation and experimental results, derived from the OrCAD PSpice simulator and a Field-Programmable Analog Array respectively, verify the efficient functionality of the proposed implementation procedure. © 2021 Elsevier B.V.
Related Publications

Journal
Hands-on analysis of using large language models for the auto evaluation of programming assignments
Journal

