Real-time vehicle detection and tracking using haar-like features and compressive tracking
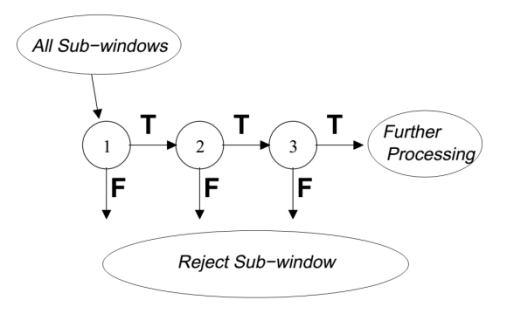
This paper presents a real-time vision framework that detects and tracks vehicles from stationary camera. It can be used to calculate statistical information such as average traffic speed and flow as well as in surveillance tasks. The framework consists of three main stages. Vehicles are first detected using Haar-like features. In the second phase, an adaptive appearance-based model is built to dynamically keep track of the detected vehicles. This model is also used in the third phase of data association to fuse the detection and tracking results. The use of detection results to update the tracker enhances the overall framework accuracy. The practical value of the proposed framework is demonstrated in real-life experiments where it is used to robustly compute vehicle counts within certain region of interest under variety of challenges. © Springer International Publishing Switzerland 2014.
Related Publications

Analysis of plasmonic nanoparticles effects on the performance of perovskite solar cells through surface recombination and short-circuiting behaviors