


Conference Paper
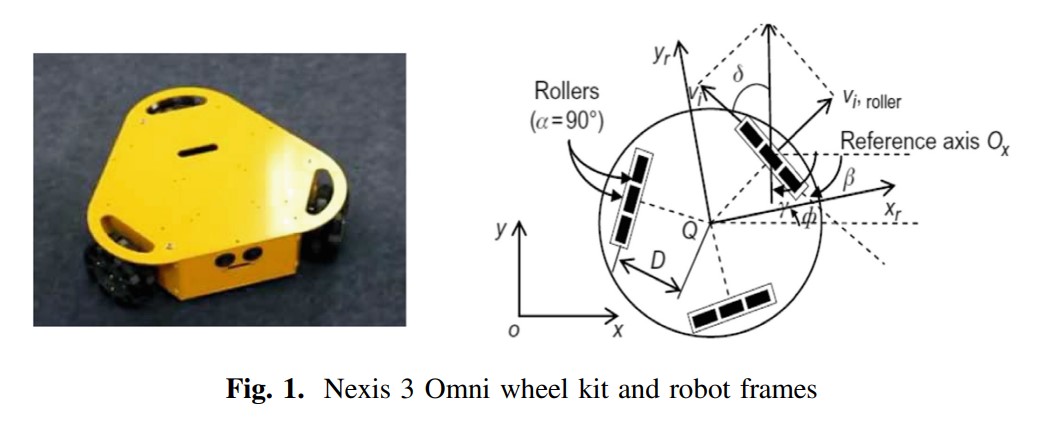
Path Planning Control for 3-Omni Fighting Robot Using PID and Fuzzy Logic Controller
This paper addresses a comparison between some control methods of three Omni wheels firefighting robot due to the variety of maneuverability. To achieve path planning for firefighting robot to reach a specific point with the shortest path, a kinematics model of omni wheel robot is applied with some control algorithms based on PID controller, Fuzzy logic controller and self-tuned PID using fuzzy logic techniques. Hardware prototype has been tested to validate the simulation results. © 2020, Springer Nature Switzerland AG.
Related Publications

Journal
Hands-on analysis of using large language models for the auto evaluation of programming assignments
Journal

