Optimal Design of PID Controller for 2-DOF Drawing Robot Using Bat-Inspired Algorithm
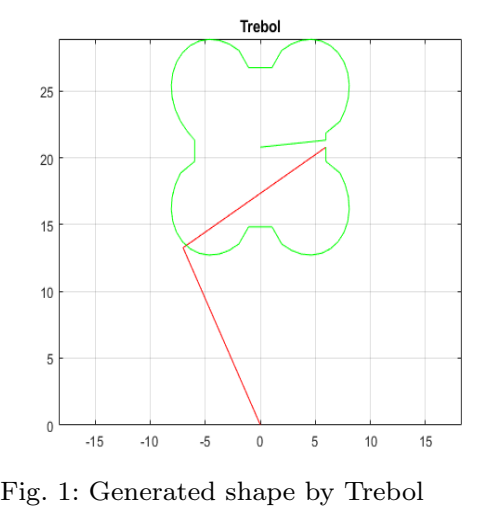
Tuning process which is used to find the optimum values of the proportional integral derivative (PID) parameters, can be performed automatically using meta-heuristics algorithms such as BA (Bat Algorithm), PSO (Particle Swarm Optimization) and ABC (Artificial Bee Colony). This paper presented a theoretical and practical implementation of a drawing robot using BA to tune the PID controller governing the robotic arm which is a non linear system difficult to be controlled using classical control. In line with the above and in order to achieve this aim and meet high performance feedback and robust dynamic stability of the system, the PID controller is designed considering the realistic constraints. For faster tuning of the controller parameters, ten individuals and five iterations have been selected. BA, ABC and PSO have been compared and it’s noticed that BA is the best choice to achieve good performance control. In the proposed design, MATLAB was used for trajectory reckoning. Afterwards, the value of coordinate position of the shape to be drawn is translated into a joint angle by applying the inverse kinematics to control the two DC motors through the ATMEGA 2560 microcontroller. The suggested technique reveals via simulations and hardware implementation the high efficiency of the applied algorithm. The PID controller approach presents an impressive stability and robustness results. The achieved results demonstrated that high performance can be obtained by tuning a PID controller using nature inspired based algorithms. © Springer Nature Switzerland AG 2020.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments