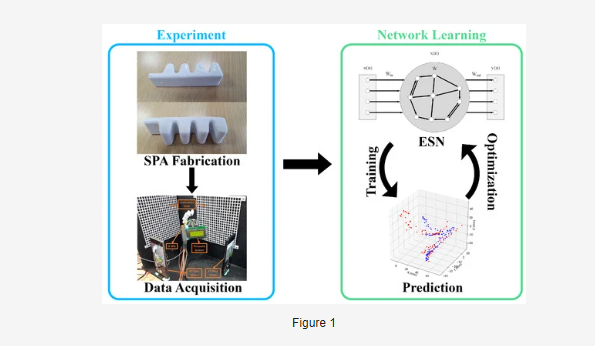
Modeling of Soft Pneumatic Actuators with Different Orientation Angles Using Echo State Networks for Irregular Time Series Data
Modeling of soft robotics systems proves to be an extremely difficult task, due to the large deformation of the soft materials used to make such robots. Reliable and accurate models are necessary for the control task of these soft robots. In this paper, a data-driven approach using machine learning is presented to model the kinematics of Soft Pneumatic Actuators (SPAs). An Echo State Network (ESN) architecture is used to predict the SPA’s tip position in 3 axes. Initially, data from actual 3D printed SPAs is obtained to build a training dataset for the network. Irregularintervals pressure inputs are used to drive the SPA in different actuation sequences. The network is then iteratively trained and optimized. The demonstrated method is shown to successfully model the complex non-linear behavior of the SPA, using only the control input without any feedback sensory data as additional input to the network. In addition, the ability of the network to estimate the kinematics of SPAs with different orientation angles θ is achieved. The ESN is compared to a Long Short-Term Memory (LSTM) network that is trained on the interpolated experimental data. Both networks are then tested on Finite Element Analysis (FEA) data for other θ angle SPAs not included in the training data. This methodology could offer a general approach to modeling SPAs with varying design parameters. © 2022 by the authors. Licensee MDPI, Basel, Switzerland.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments