Design of fractional order fuzzy sliding mode controller for nonlinear complex systems
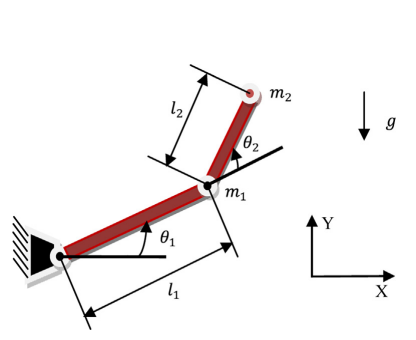
Controlling a nonlinear, time-varying, uncertain, coupled multiinput-multioutput (MIMO) complex system is always a challenging task for control engineers. A linear PID controller is not able to control effectively these complex systems and a robust adaptive controller is needed for perfect control. In this chapter, a fractional order fuzzy sliding mode proportional derivative (FOFSMCPD) controller is presented to control a two-link planar rigid robotic manipulator system. Literature reveals that sliding mode controllers (SMC) have the serious issue of fast oscillations, called chattering, in the controller output. To reduce the chattering phenomena, FOFSMCPD is presented where a fuzzy logic control is used to vary the gains of reaching law. Fractional order is added to increase the robustness of the controller. To show the efficacy of the controller, the obtained performance is compared with integer order SMC proportional and derivative controller. A meta-heuristic optimization technique, genetic algorithm, is used to find the optimized gains of the controller. The performances of the FOFSMCPD controller are evaluated in servo as well as regulatory mode with and without model uncertainty. Simulation results show the superiority of the FOFSMCPD controller. © 2018 Elsevier Inc. All rights reserved.
Related Publications

Analysis of plasmonic nanoparticles effects on the performance of perovskite solar cells through surface recombination and short-circuiting behaviors