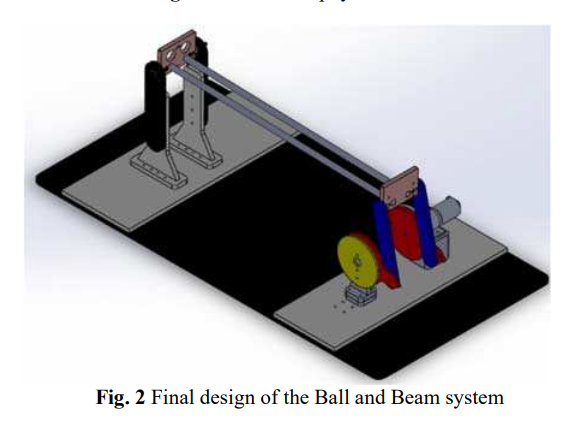
Design and Implementation of a Ball and Beam PID Control System Based on Metaheuristic Techniques
The paper introduces a comparative analysis between three meta-heuristic techniques in the optimization of Proportional-Integral-Derivative (PID) controller for a cascaded control of a ball and beam system. The meta-heuristic techniques presented in this study are Particle Swarm Optimization (PSO), Artificial Bee Colony (ABC) and Bat Algorithm Optimization (BAO). The model uses a DC motor with encoder to move the beam and a camera as a feedback for the ball position on the beam. The control theory of the system depends on two loops; the first (inner) loop is the DC motor for position control. The three meta-heuristic techniques are applied for the tuning of the PID parameters then the efficiency of each algorithm is compared based on the time response, overshoot and steady state error. The BAT algorithm has proved to be more efficient in optimizing the controller for the motor position control. The same three algorithms are then applied for the outer loop: the Simulink model of the ball and beam system. Having the time response, overshoot and steady state error as the criteria, the PSO algorithm showed better performance in optimizing the controller for the overall system. © Springer Nature Switzerland AG 2020.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments