Deep convolutional neural network based autonomous drone navigation
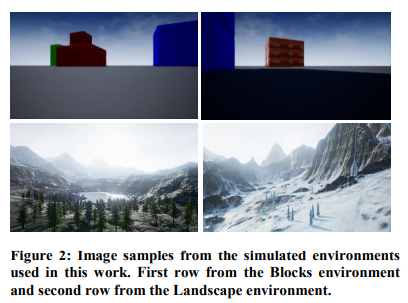
This paper presents a novel approach for aerial drone autonomous navigation along predetermined paths using only visual input form an onboard camera and without reliance on a Global Positioning System (GPS). It is based on using a deep Convolutional Neural Network (CNN) combined with a regressor to output the drone steering commands. Furthermore, multiple auxiliary navigation paths that form a â€n˜avigation envelope' are used for data augmentation to make the system adaptable to real-life deployment scenarios. The approach is suitable for automating drone navigation in applications that exhibit regular trips or visits to same locations such as environmental and desertification monitoring, parcel/aid delivery and drone-based wireless internet delivery. In this case, the proposed algorithm replaces human operators, enhances accuracy of GPS-based map navigation, alleviates problems related to GPS-spoofing and enables navigation in GPS-denied environments. Our system is tested in two scenarios using the Unreal Engine-based AirSim [32] plugin for drone simulation with promising results of average cross track distance less than 1.4 meters and mean waypoints minimum distance of less than 1 meter. © 2021 SPIE.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments