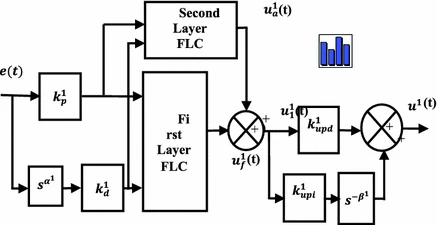
Control of a two link planar electrically-driven rigid robotic manipulator using fractional order SOFC
An intelligent adaptive fuzzy logic control technique, Fractional Order Self Organizing Fuzzy Controller (FOSOFC) is presented and applied to control a two link planar electrically-driven rigid robotic (EDRR) manipulator system. As EDRR is a multi-input multi-output complex nonlinear system, an intelligent adaptive controller, FOSOFC is considered to control it perfectly. To show the efficacy of the FOSOFC controller, the obtained performance is compared with fractional order fuzzy proportional integral and derivative (FOFPID) controller for study in servo as well as the regulatory problems. Gains of the controllers are tuned by a meta-heuristic bio-inspired algorithm namely Cuckoo Search Algorithm. Based on the trajectory tracking and disturbance rejection (DR) performances, efficiency of controllers has been accessed and it has been found that FOSOFC outperforms on FOFPID controller. © 2018, Springer International Publishing AG.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments