


Control of a Three-Link Manipulator Using Fractional-Order PID Controller
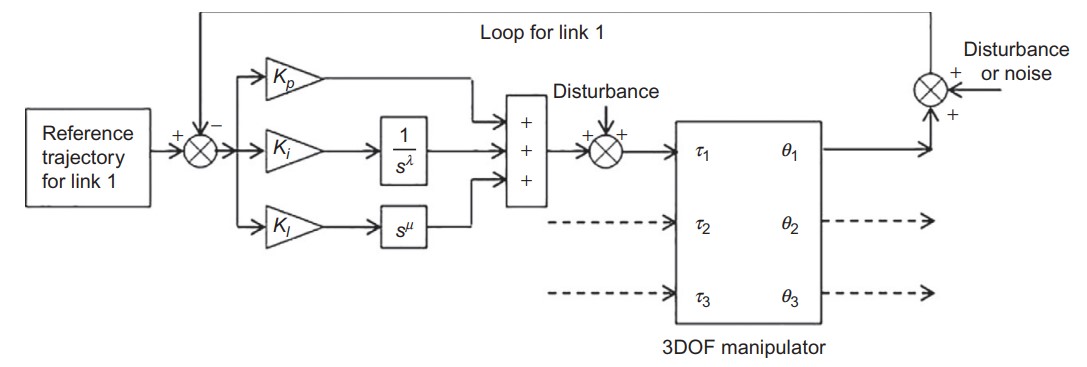
The main objective of this chapter is to evaluate the performance of a fractional-order PID (FO-PID) controller for set point tracking, disturbance rejection, and model uncertainties for the highly nonlinear coupled three-link planar rigid robotic manipulator system. Generally, a three-link planar robot is used in the manufacturing industry and experiences disturbance in many forms, such as vibrations, due to heavy machinery, fluctuation in mains, noisy industrial environment, etc. The control objective is to follow a reference path in a simulated industrial environment and under model uncertainties, which is achieved by minimizing the combination of integral of absolute error and integral of absolute change in the control signal with the help of the evaporation rate-based water cycle algorithm technique. The presented MATLAB-based simulation study revealed that the FO-PID controller outperformed the classical PID controller and demonstrated very robust behavior. © 2018 Elsevier Inc. All rights reserved.