A 4-D chaotic hyperjerk system with a hidden attractor, adaptive backstepping control and circuit design
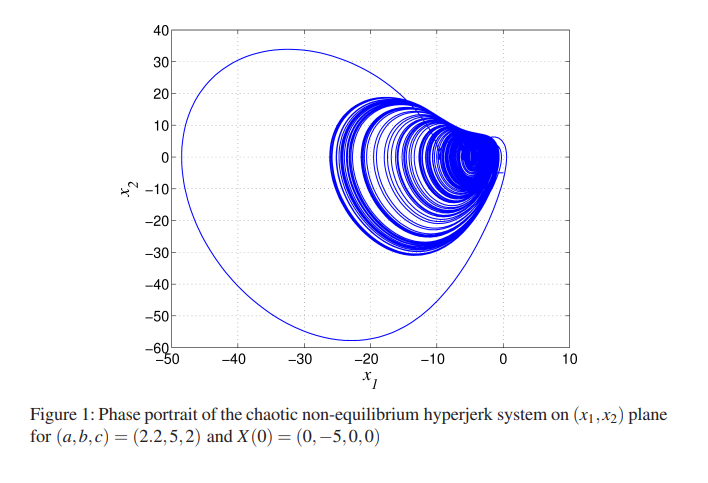
A novel 4-D chaotic hyperjerk system with four quadratic nonlinearities is presented in this work. It is interesting that the hyperjerk system has no equilibrium. A chaotic attractor is said to be a hidden attractor when its basin of attraction has no intersection with small neighborhoods of equilibrium points of the system. Thus, our new non-equilibrium hyperjerk system possesses a hidden attractor. Chaos in the system has been observed in phase portraits and verified by positive Lyapunov exponents. Adaptive backstepping controller is designed for the global chaos control of the non-equilibrium hyperjerk system with a hidden attractor. An electronic circuit for realizing the non-equilibrium hyperjerk system is also introduced, which validates the theoretical chaotic model of the hyperjerk system with a hidden chaotic attractor.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments