Conference Paper
UAV Tracking System Using Integrated Sensor Fusion with RTK-GPS
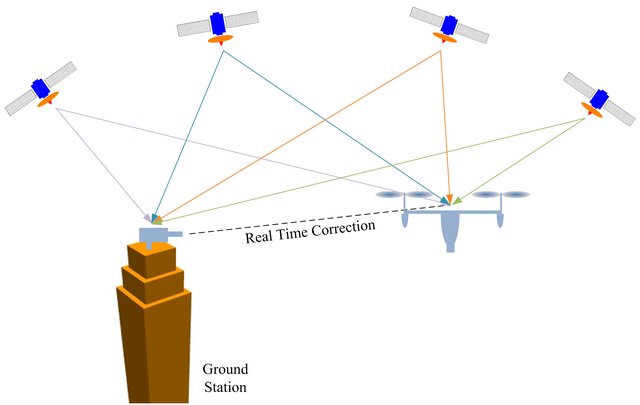
Tracking Unmanned Aerial Vehicles (UAVs) is a significant surge in commercial or recreational use. The proposed tracking system is involved in determining the position and attitude angles of the UAVs in real-time. Data fusion of multiple sensors is one of the technologies used most in recent years and is based on real-time estimation of UAV's both position and attitude angles with high precision. In order to accomplish this objective, sensor fusion of an accelerometer, a gyroscope, a magnetometer, and a real-time kinematic global positioning system (RTK-GPS) sensors are implemented in this paper to decrease the uncertainty in position and attitude angles and establish the drone's location more precisely. © 2021 IEEE.