


Circuit Theory and Applications
Synchronization and FPGA realization of fractional-order Izhikevich neuron model
This paper generalizes the Izhikevich neuron model in the fractional-order domain for better modeling of neuron dynamics. Accurate and computationally efficient numerical techniques such as non-standard finite difference (NSFD) scheme is used to solve the neuron system in the fractional-order domain for different cases. Neuron synchronization plays an important role in the process of information exchange among coupled neurons. The general formula for the synchronization of different Izhikevich neurons is proposed. Also, the synchronization of two and three neurons are studied at different
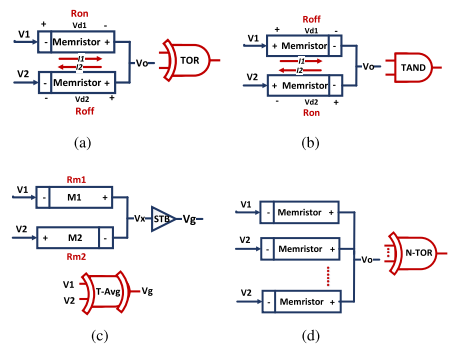
Ternary Functions Design Using Memristive Threshold Logic
Memristive threshold logic (MTL) concept is emerged in many circuits to enable high-performance systems in terms of power, energy, area, and delay. This paper proposes a systematic method for building two-bit ternary number functions based on the MTL concept. The proposed method is applied to build the basic ternary arithmetic operations. The implementation of two-bit adder and multiplier is presented in the unbalanced ternary number representation. The proposed designs are verified by using VTEAM memristor and Stanford CNTFET transistor models. Finally, a comparison between the proposed
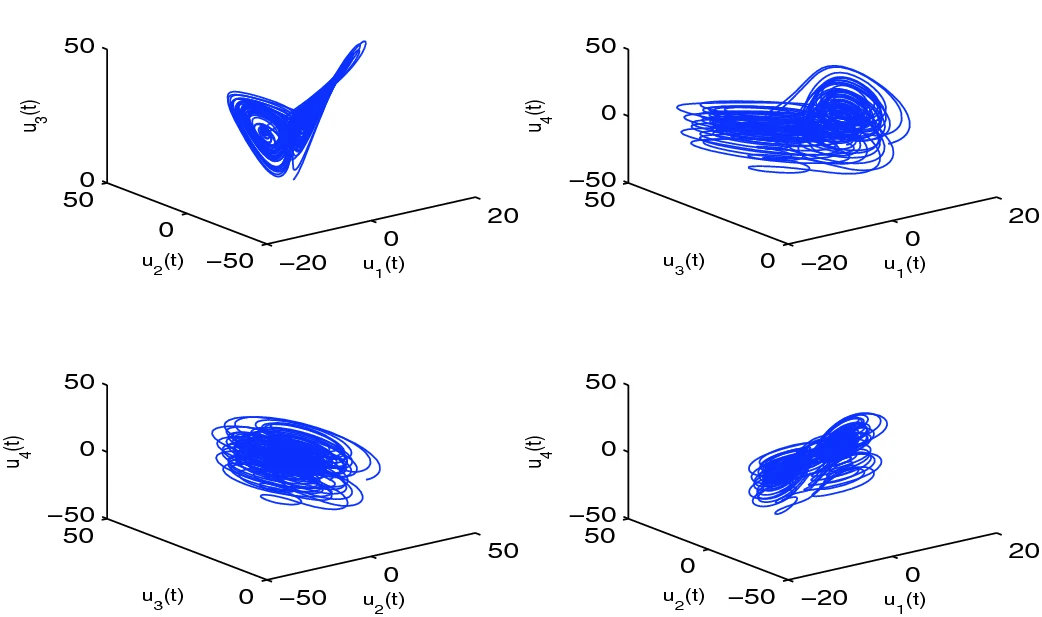
Synchronization between a Novel Integer-Order Hyperchaotic System and a Fractional-Order Hyperchaotic System Using Tracking Control
This manuscript investigates the synchronization between a novel integer order hyperchaotic system and a fractional order hyperchaotic system. The controllers are constructed using the technique of tracking controller and the stability theory of the linear fractional order system. Chaotic analysis of the introduced novel integer order hyperchaotic system is also investigated. The Lyapunov exponent, bifurcation diagram, Poincare section, Kaplan-Yorke dimension, equilibria and phase portraits are given to justify the chaotic nature of the system. Theoretical results are supported with the
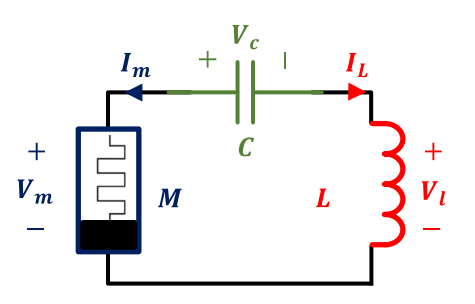
Hardware realization of a secure and enhanced s-box based speech encryption engine
This paper presents a secure and efficient substitution box (s-box) for speech encryption applications. The proposed s-box data changes every clock cycle to swap the input signal with different data, where it generated based on a new algorithm and a memristor chaotic system. Bifurcation diagrams for all memristor chaotic system parameters are introduced to stand for the chaotic range of each parameter. Moreover, the effect of each component inside the proposed encryption system is studied, and the security of the system is validated through perceptual and statistical tests. The size of the
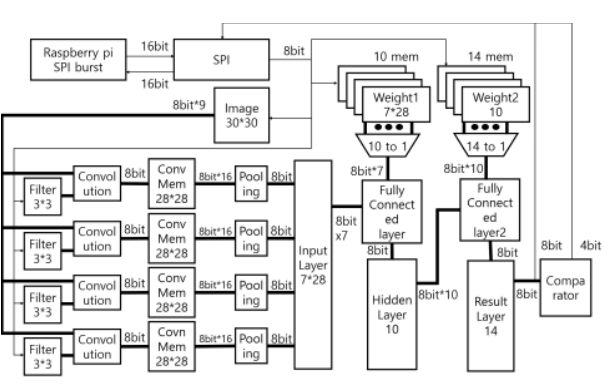
High Speed, Approximate Arithmetic Based Convolutional Neural Network Accelerator
Convolutional Neural Networks (CNNs) for Artificial Intelligence (AI) algorithms have been widely used in many applications especially for image recognition. However, the growth in CNN-based image recognition applications raised challenge in executing millions of Multiply and Accumulate (MAC) operations in the state-of-The-Art CNNs. Therefore, GPUs, FPGAs, and ASICs are the feasible solutions for balancing processing speed and power consumption. In this paper, we propose an efficient hardware architecture for CNN that provides high speed, low power, and small area targeting ASIC implementation
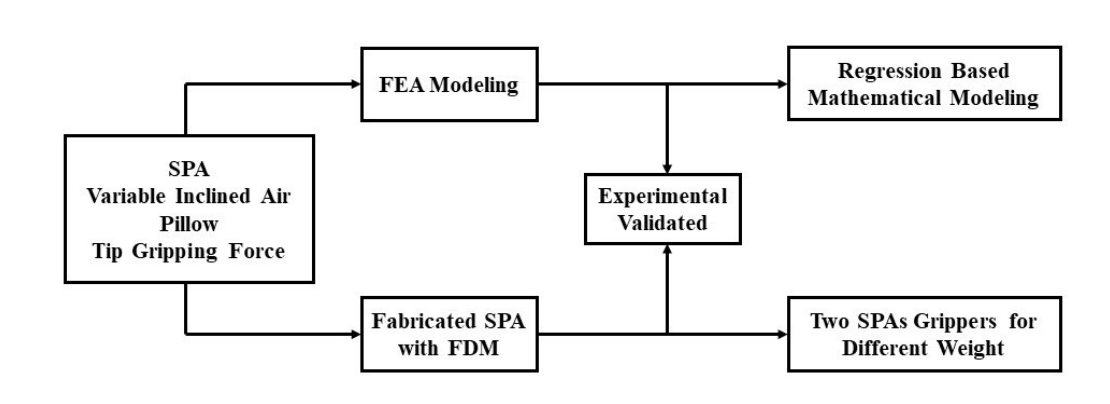
Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator
Soft pneumatic actuators grasping tasks is one of the essential rules in robot manipulation methods. The grasping forces can be adapted to handle delicate and hard objects without leaving any damages on the object surfaces. This paper investigates the influence of the inclination angle of the soft pneumatic actuator (SPA) on its gripping force at its end tip. A range of inclination angles for SPA is analyzed using Finite Element Analysis (FEA) to estimate the gripping force at the end tip regarding SPA inner faces pressure. FEA study is conducted based on Hyperelastic material modeling
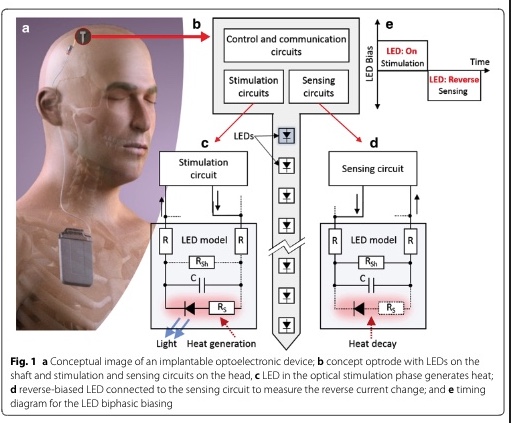
A current-mode system to self-measure temperature on implantable optoelectronics
Background: One of the major concerns in implantable optoelectronics is the heat generated by emitters such as light emitting diodes (LEDs). Such devices typically produce more heat than light, whereas medical regulations state that the surface temperature change of medical implants must stay below + 2 °C. The LED's reverse current can be employed as a temperature-sensitive parameter to measure the temperature change at the implant's surface, and thus, monitor temperature rises. The main challenge in this approach is to bias the LED with a robust voltage since the reverse current is strongly
Design of fractional-order differentiator-lowpass filters for extracting the R peaks in ECG signals
An implementation of a fractional-order differentiator-lowpass filter is presented in this work, which is constructed from Operational Transconductance Amplifiers as active cells. This offers the benefits of electronic tuning and, also, of monolithic implementation. The presented scheme has been employed for the extraction of the R peaks in electrocardiogram signals due to its efficiency for performing this task even in a noisy environment. The provided post-layout simulation results confirm the correct operation of this solution as well as its reasonable sensitivity characteristics. © 2019
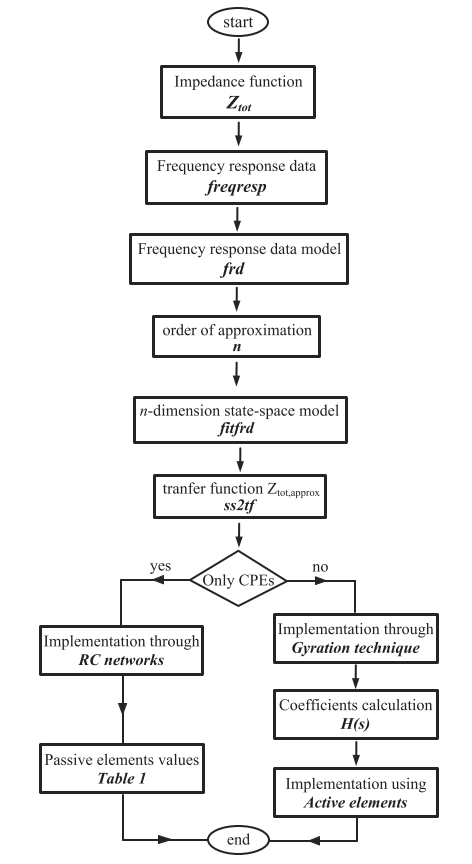
Simple implementations of fractional-order driving-point impedances: Application to biological tissue models
A novel procedure for the circuit implementation of the driving-point impedance of frequency-domain material models, constructed from fractional-order elements of arbitrary type and order, is introduced in this work. Following this newly introduced concept, instead of emulating separately each fractional-order element in the model under consideration, the direct emulation of the complete model can be achieved through the approximation of the total impedance function. The magnitude and phase frequency responses of the impedance function are first extracted and approximated through curve-fitting
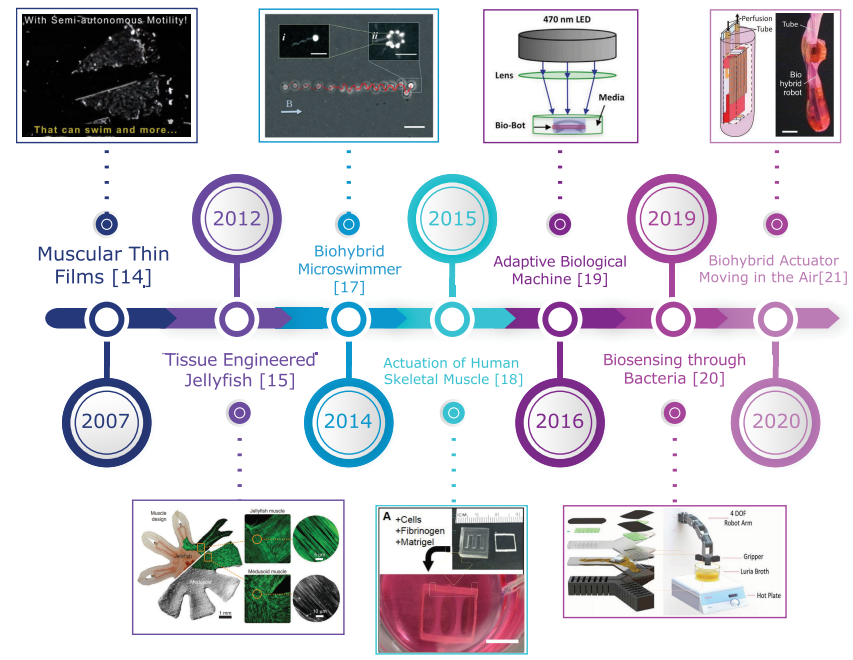
Biohybrid soft robots, E-skin, and bioimpedance potential to build up their applications: A review
Soft Robotics is a new approach towards better human-robot interaction and biomimicry in the robotics field. Its integration with biological materials (Biohybrid soft robotics) is one of the topics being focused on in the soft robotics research in the last fifteen years. The motive for this approach is to combine the best of biological and artificial systems. In this article, Biohybrid soft robots and Electronic Skin (E-skin), which is considered one of the advances of soft robotics, are reviewed. Their most significant milestones and the highlights of their most researched applications are