


Agriculture and Crops
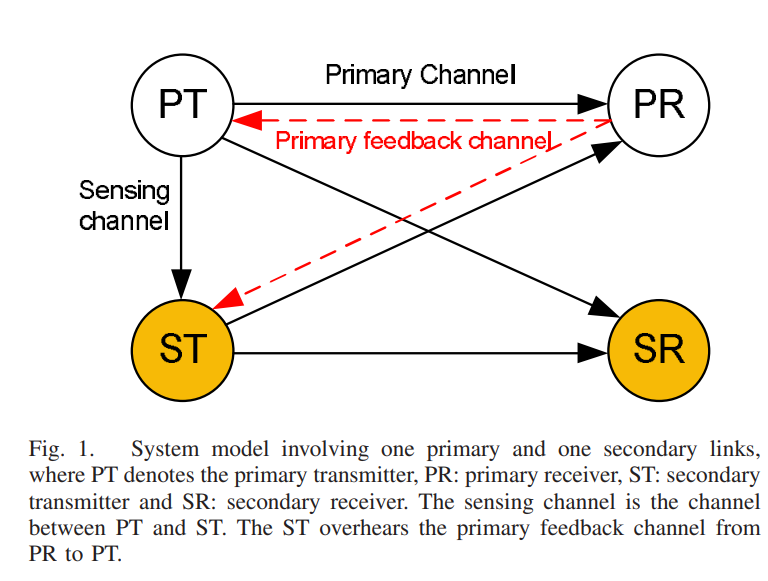
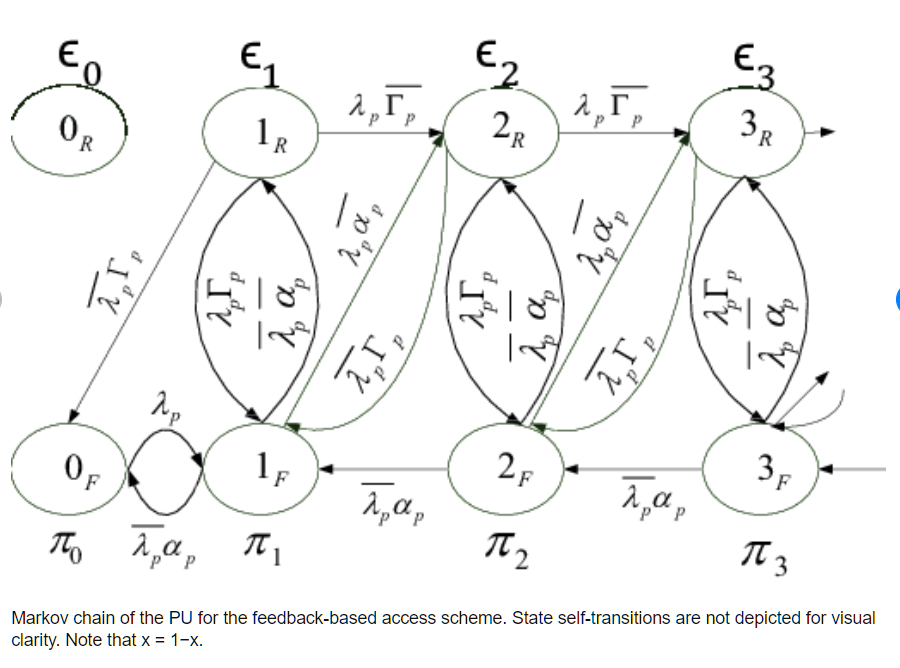
Leveraging primary feedback and spectrum sensing for cognitive access
We consider a time-slotted primary system where both the primary channel and primary activity are modeled as two independent two-state Markov chains. The primary transmitter can be idle or busy, whereas the channel can be in erasure or not. Moreover, the sensing channel between the primary transmitter and secondary transmitter is modeled as a two-state Markov chain to represent two levels of sensing reliability. At the beginning of each time slot, the secondary transmitter may remain idle, transmit directly, or probe the channel and access the channel only if it is sensed to be free. At the
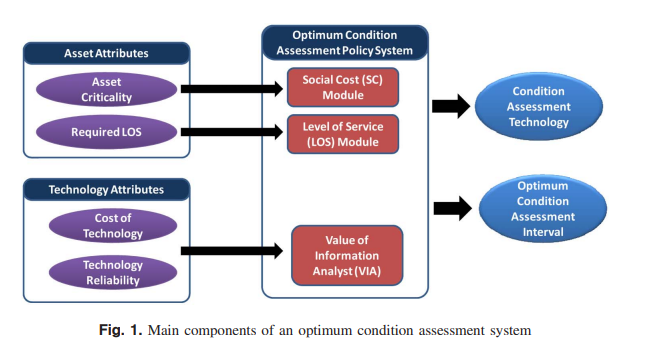
Optimizing inspection policies for buried municipal pipe infrastructure
Condition assessment is an integral component in any infrastructure asset management system. Without condition information, asset managers lack the ability to make appropriate decisions regarding needed maintenance, rehabilitation, and replacement of infrastructure. Existing and emerging technologies for assessing the condition of water and sewer pipes provide a better picture of the state of these buried assets. Unfortunately, many of these technologies are costly and provide results that are not always highly reliable. This paper presents a methodology to assist asset managers in balancing
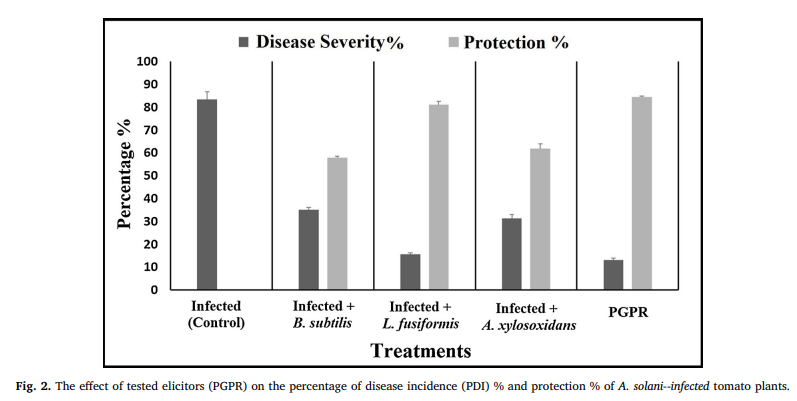
The effective antagonistic potential of plant growth-promoting rhizobacteria against Alternaria solani-causing early blight disease in tomato plant
Tomato plants can be infected by several diseases, among them, the early blight disease, caused by the necrotrophic fungus Alternaria solani is very dangerous. Plant growth promoting rhizobacteria (PGPR) are enhanced the plant growth and suppress plant diseases. The current study was conducted in a pot experiment to investigate the bio-efficacy antagonistic bacterial isolates as either individual or combination against tomato early blight disease. Disease severity and protection percent, morphological indicators as well as yield characters were recorded. In vitro antagonistic activity assay of
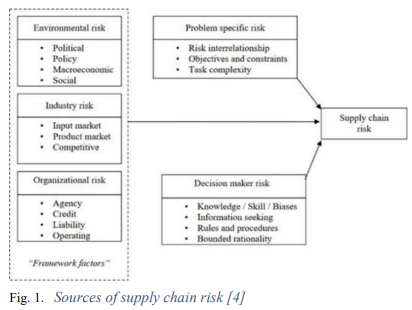
Supply Chain Risk Assessment Using Fuzzy Logic
Business's strength arises from the strength of its supply chain. Therefore, a proper supply chain management is vital for business continuity. One of the most challenging parts of SCM is the contract negotiation, and one main aspect of the negotiation is to know the risk associated with each range of quantity agreed on. Currently Managers assess the quantity to be supplied based on a binary way of either full or 0 supply, This paper aims to assess the corresponding quantities risks of the suppliers on a multilayer basis. The proposed approach uses fuzzy logic as an artificial intelligence

Fabrication of bio-plastic composite pellets from agricultural waste and food waste

Extraction of degradable bio polymer materials from shrimp shell wastes by two different methods
Chitosan is one of the most widespread biopolymer materials available in nature which is extracted from chitin. The main source of chitosan is the chitin that is extracted from exoskeletons of crustacean, such as shrimp and crabs, which are found in a huge amount of shells waste that produced from seafood companies around the world. The chitosan has several applications such as pharmaceutical, fertilizer and edible coating in food industries. The quality of the chitosan's depends on its extraction method, so in this research work we have studied the effect of grounding shrimp shell waste
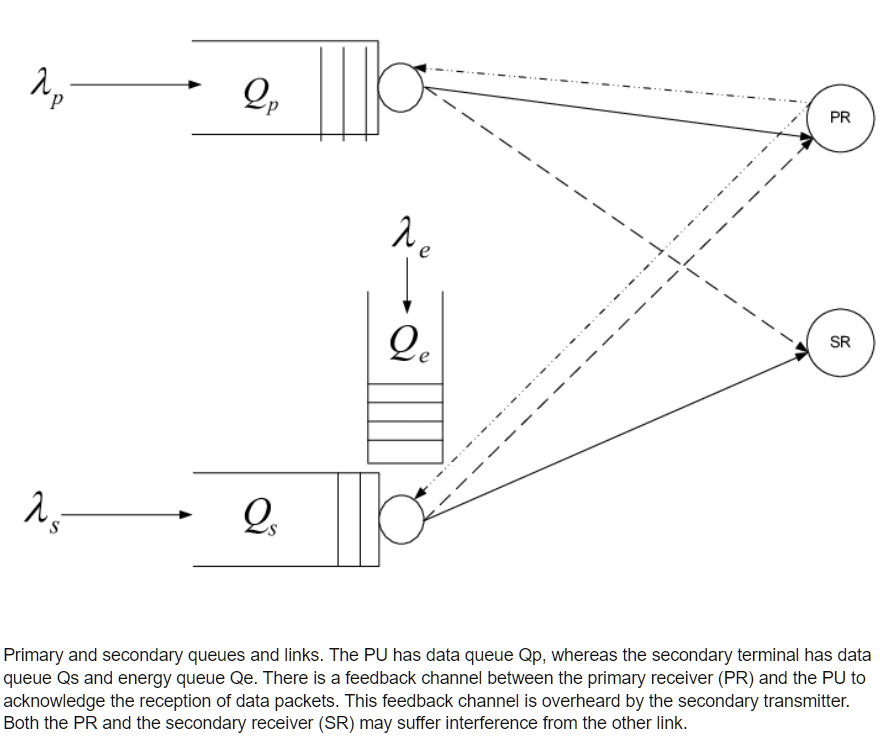
Optimal random access and random spectrum sensing for an energy harvesting cognitive radio
We consider a secondary user with energy harvesting capability. We design access schemes for the secondary user which incorporate random spectrum sensing and random access, and which make use of the primary automatic repeat request (ARQ) feedback. The sensing and access probabilities are obtained such that the secondary throughput is maximized under the constraints that both the primary and secondary queues are stable and that the primary queueing delay is kept lower than a specified value needed to guarantee a certain quality of service (QoS) for the primary user. We consider spectrum sensing
Optimal random access for a cognitive radio terminal with energy harvesting capability
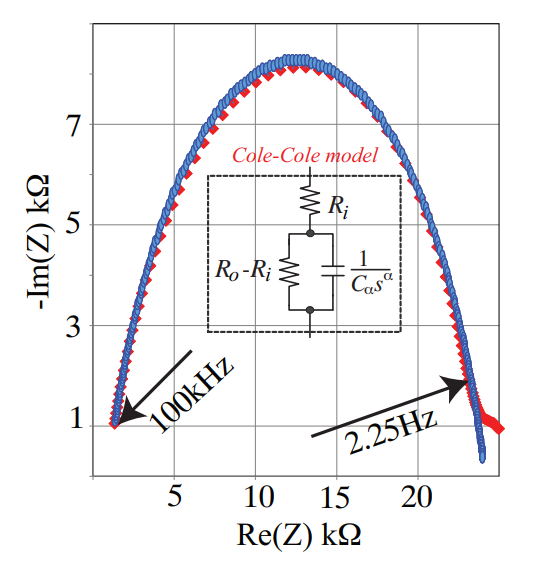
Cole-Cole Bio-Impedance Parameters Extraction from a Single Time-Domain Measurement
We show that the four parameters of a single-dispersion Cole-Cole bio-impedance model can be extracted from an one time-domain measurement with a fixed frequency. In particular, a periodic triangle waveform current excitation signal is injected into the biological sample under study while measuring the voltage developed across this sample in a galvanostatic measurement setup. The voltage response due to this triangle-wave excitation is firstly analytically derived in closed form. After that the Flower Pollination optimization Algorithm (FPA) is applied to extract the unknown model parameters
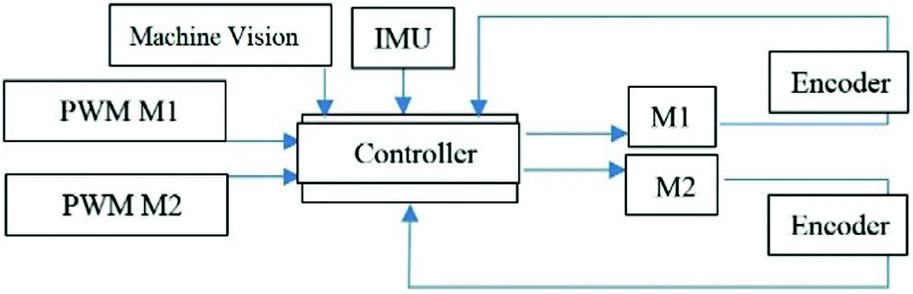
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path