Fractional chaos maps with flower pollination algorithm for chaotic systems’ parameters identification
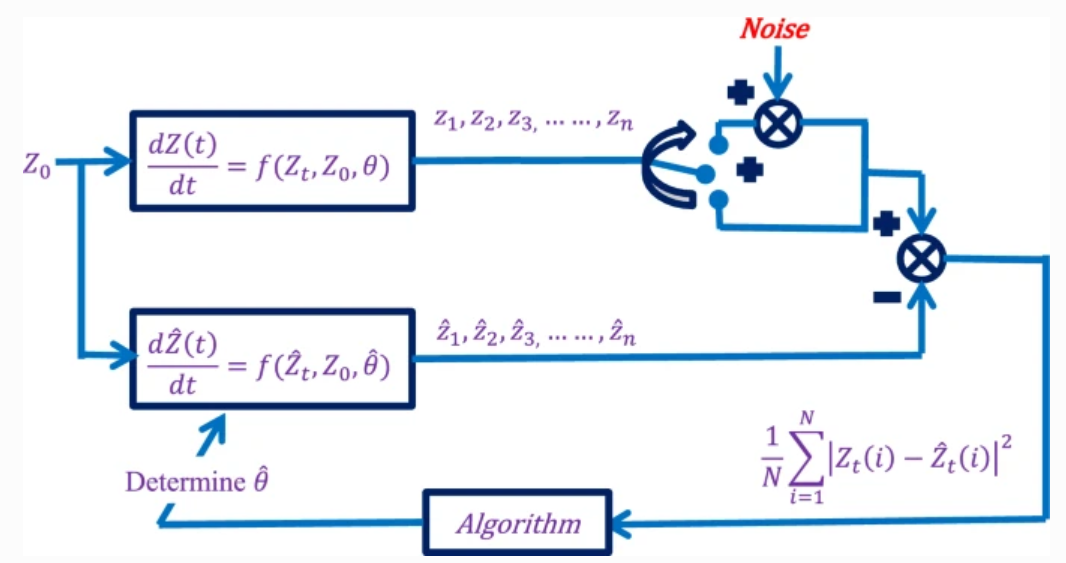
Meta-heuristic optimization algorithms are the new gate in solving most of the complicated nonlinear systems. So, improving their robustness, reliability, and convergence speed is the main target to meet the requirements of various optimization problems. In the current work, three different fractional-order chaos maps (FC-maps), which have been introduced recently, are incorporated with the fundamental flower pollination algorithm to tune its parameters adaptively. These maps are fractional logistic map, fractional sine map, fractional tent map, and their integer-order versions. As a result, fractional chaotic FPA (FC-FPA) is proposed. The FC-FPA has been mathematically tested over 10-, 30-, 50-, and 100-dimensional CEC 2017 benchmark functions. Moreover, the influence of merging FC-maps with FPA is investigated in case of increasing the number of maximum evaluation functions based on the ten functions of CEC 2020. Additionally, to assess the superiority of the proposed FC-FPA algorithm for more complicated optimization problems, it has been tested to extract the parameters of different chaotic systems with and without added noise. In addition, it is tested on the identification of the corresponding parameters for the chaotic behavior in brush-less DC motor. The results of the fractional version of CFPA are compared with that of integer CFPA and standard FPA via an extensive statistical analysis. Furthermore, a nonparametric statistical test is employed to affirm the superiority of the proposed fractional variants of CFPA. It is evident that the performance of FPA is highly influenced by integrating the fractional-order chaos maps as the introduced FC-FPA variants provide a better accurate and more consistent results as well as a higher speed of convergence especially upon using the fractional sine map. © 2020, Springer-Verlag London Ltd., part of Springer Nature.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments