


Distributed component-based framework for Unmanned Air Vehicle systems
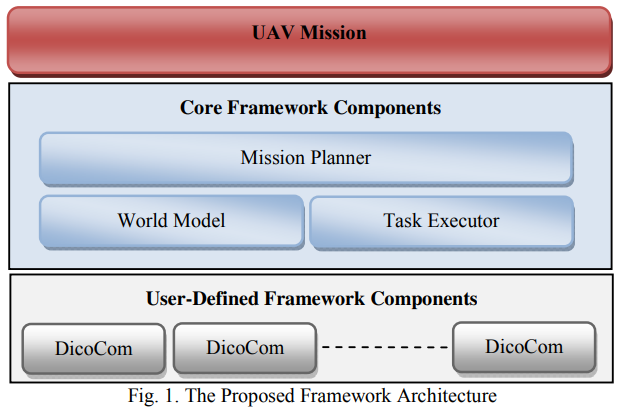
Unmanned Air Vehicles (UAVs) are gaining increased importance in a variety of applications, both military and civilian, due to their ability to carry out critical missions with reduced costs and minimal risks to human life. However, a UAV system is essentially a complex distributed system involving multiple heterogeneous software and hardware modules. The seamless integration of such components is one of the key challenges facing UAV systems. Furthermore, developing and maintaining a UAV system is a highly expensive and time consuming process. In this paper we present the framework a novel distributed component-based software framework that facilitates rapid development, seamless integration and run-time maintenance of UAV systems. The framework is composed of four main components: the Mission Planner, the Task Executer, the World Model, and DicoCom. Whereas the first three components facilitate the creation and execution of UAV missions, the latter is a generic component model that constitutes the basis for creating distributed components with different interaction patterns. Furthermore, the framework provides a scripting language, called DicoScript, used for binding the distributed components together and describing high level UAV missions. This paper presents the framework design goals and architecture, elucidates the main framework components and the DicoScript language, and describes the use of the framework to create UAV-based search and rescue application. © 2012 IEEE.