


Publications
Publications
Filter by
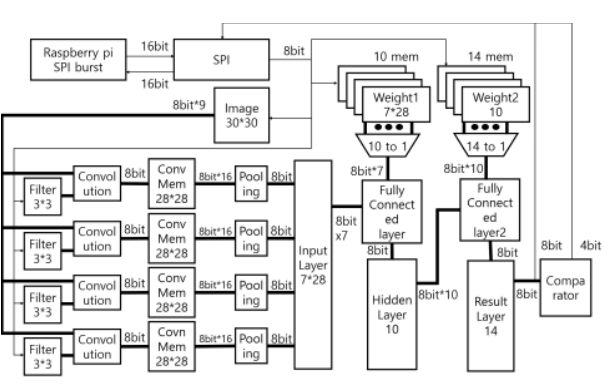
High Speed, Approximate Arithmetic Based Convolutional Neural Network Accelerator
Convolutional Neural Networks (CNNs) for Artificial Intelligence (AI) algorithms have been widely used in many applications especially for image recognition. However, the growth in CNN-based image recognition applications raised challenge in executing millions of Multiply and Accumulate (MAC) operations in the state-of-The-Art CNNs. Therefore, GPUs, FPGAs, and ASICs are the feasible solutions for
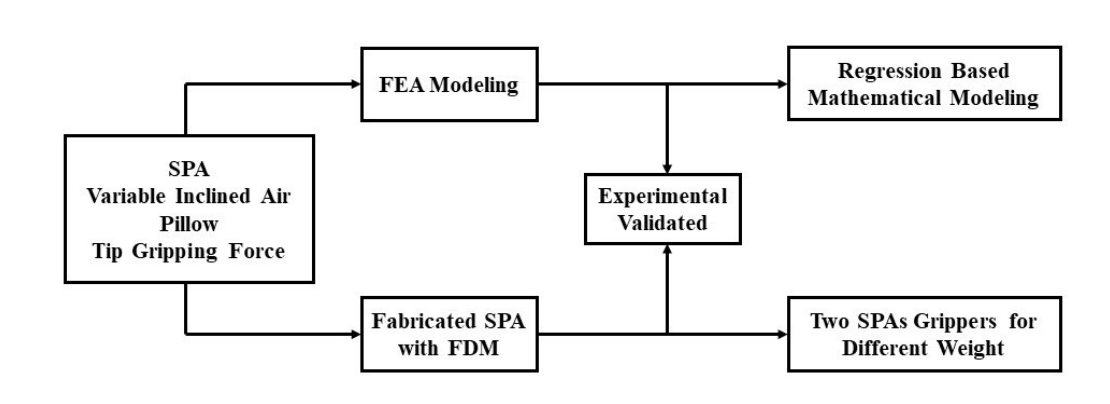
Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator
Soft pneumatic actuators grasping tasks is one of the essential rules in robot manipulation methods. The grasping forces can be adapted to handle delicate and hard objects without leaving any damages on the object surfaces. This paper investigates the influence of the inclination angle of the soft pneumatic actuator (SPA) on its gripping force at its end tip. A range of inclination angles for SPA
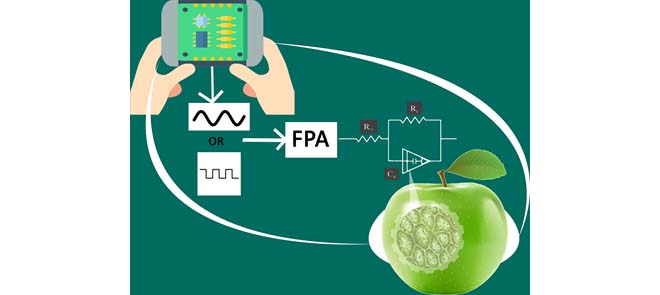
Extracting Optimized Bio-Impedance Model Parameters Using Different Topologies of Oscillators
This paper demonstrates the possibility of extracting the single-dispersion and double-dispersion Cole-bio-impedance model parameters using oscillators (sinusoidal or relaxation). The method is based on replacing selected components in the oscillator structure with the biological sample under test and then using the Flower Pollination optimization Algorithm (FPA) to solve a set of nonlinear
Neural Knapsack: A Neural Network Based Solver for the Knapsack Problem
Swarm intelligence application to UAV aided IoT data acquisition deployment optimization

Study of Approaches to Implement the Prism-Based Surface Plasmon Resonance Sensors
Surface plasmon resonance (SPR) sensors are increasingly in demand due to their high sensitivity, better accuracy, and improved detection limit. Such performance parameters make these sensors suitable for biological and medical field’s applications. During the last decade, prism coupling-based SPR sensors had been a preferred choice among the designer and developers across the globe. This article
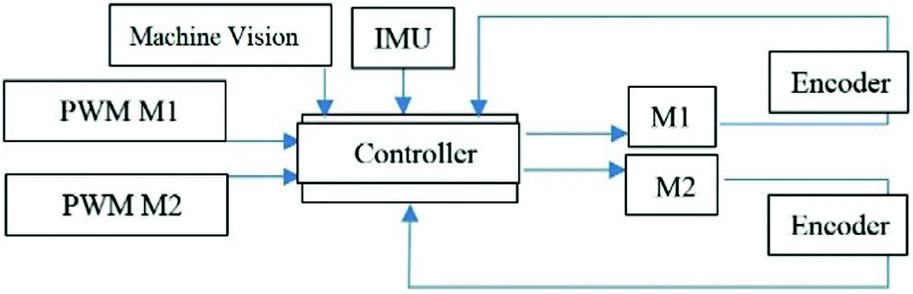
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool
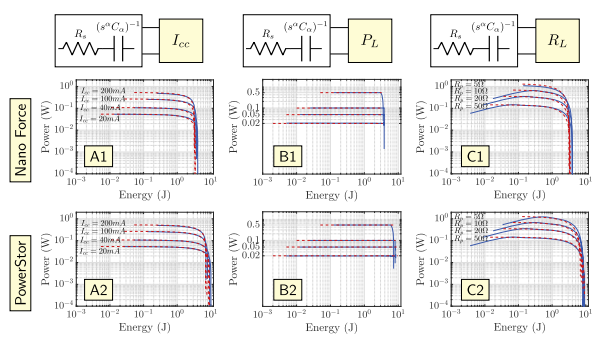
Communication-The Ragone Plot of Supercapacitors under Different Loading Conditions
The power-energy performance of supercapacitors is usually visualized by the Ragone plot of (gravimetric or volumetric) energy density vs power density. The energy is commonly computed from E = CV2/2, and the power from P = E/Δt, which assume RCbased models. In this study, we investigate the energy-power profiles of two commercial supercapacitors discharged with three different types of loads: (i)
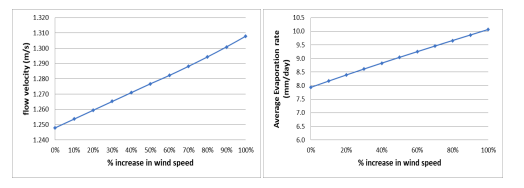
Combined effect of wind speed and covering irrigation canals on water quality parameters
Wind has a considerable effect on many water quality parameters. Some of the parameters are directly affected by the wind, while others are influenced by other physical water parameters like the velocity, temperature. etc. that are affected by wind and hence transfer their effect to water quality parameters. As the wind has an effect on water quality parameters, also covering waterways has a great

Extraction of bioimpedance phase information from its magnitude using a non-uniform Kramers–Kronig transform
A novel non-uniform Kramers–Kronig Transform algorithm for bioimpedance phase extraction is proposed and tested in this work. The algorithm error is studied and compared with a previously proposed phase extraction technique, also based on the Kramers–Kronig transform. Results using simulated datasets and experimental datasets confirm the excellent performance of the algorithm. © 2020, European