


Circuit Theory and Applications
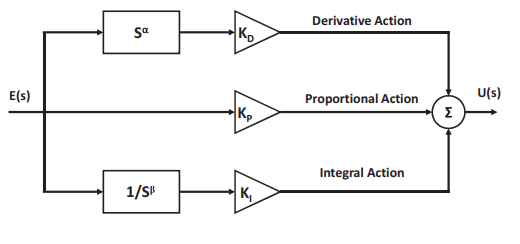
Design of fopid controller for a dc motor using approximation techniques
This paper introduces a study of fractional-order PID (FOPID) controller applied to a DC motor. The idea is to control the motor speed using the FOPID and compare it with the conventional PID controller. Two approximation techniques are employed to realize the FOPID, which are Matsuda and Oustaloup, each with order four. Different responses are depicted for various fractional orders. A specific case study for controlling the speed of a DC motor is investigated with selected fractional-orders. A comparison between the two applied techniques is proposed on the case study to determine which
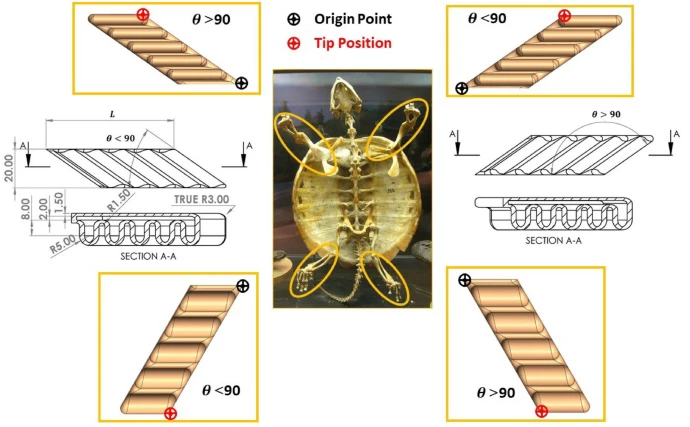
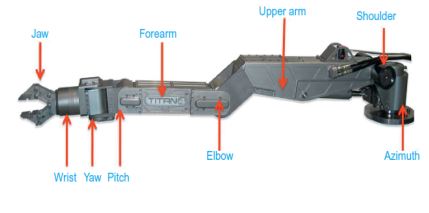
Modelling and implementation of soft bio-mimetic turtle using echo state network and soft pneumatic actuators
Advances of soft robotics enabled better mimicking of biological creatures and closer realization of animals’ motion in the robotics field. The biological creature’s movement has morphology and flexibility that is problematic deportation to a bio-inspired robot. This paper aims to study the ability to mimic turtle motion using a soft pneumatic actuator (SPA) as a turtle flipper limb. SPA’s behavior is simulated using finite element analysis to design turtle flipper at 22 different geometrical configurations, and the simulations are conducted on a large pressure range (0.11–0.4 Mpa). The
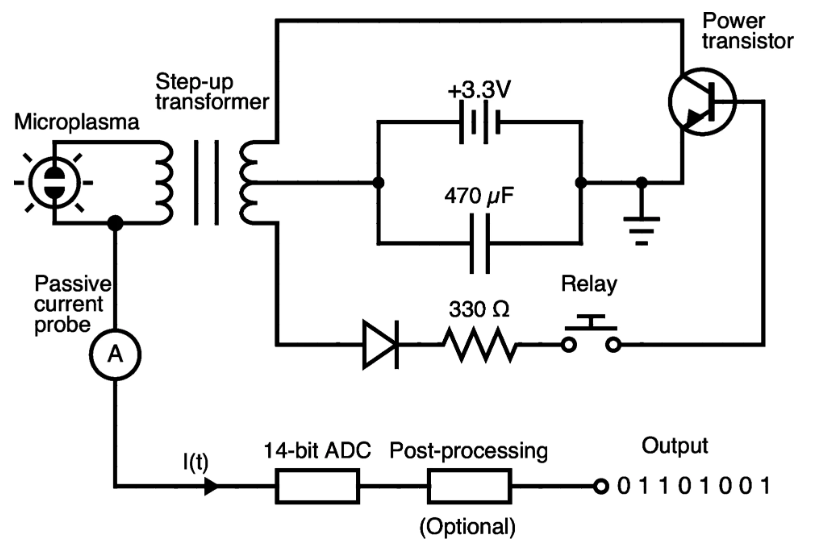
Atmospheric pressure air microplasma current time series for true random bit generation
Generating true random bits of high quality at high data rates is usually viewed as a challenging task. To do so, physical sources of entropy with wide bandwidth are required which are able to provide truly random bits and not pseudorandom bits, as it is the case with deterministic algorithms and chaotic systems. In this work we demonstrate a reliable high-speed true random bit generator (TRBG) device based on the unpredictable electrical current time series of atmospheric pressure air microplasma (APAMP). After binarization of the sampled current time series, no further post-processing was
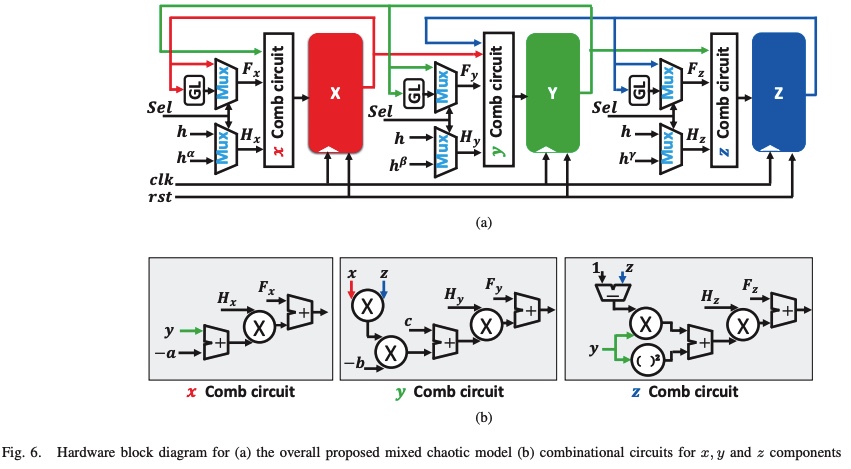
A Digital Hardware Implementation for A new Mixed-Order Nonlinear 3-D Chaotic System
This paper introduces a generic modeling for a 3-D nonlinear chaotic based on fractional-order mathematical rules. Also, a novel modeling for the system using a mixture between integer and fractional-order calculus is proposed. Dynamics of the new realization are illustrated using phase portrait diagrams with complex behavior. Also, a great change in the parameter ranges is investigated using bifurcation diagrams. MATLAB and Xilinx ISE 14.5 are used in system simulations. Furthermore, the digital hardware implementation is done using Xilinx FPGA Virtex-5 kit. The synthesis report shows that
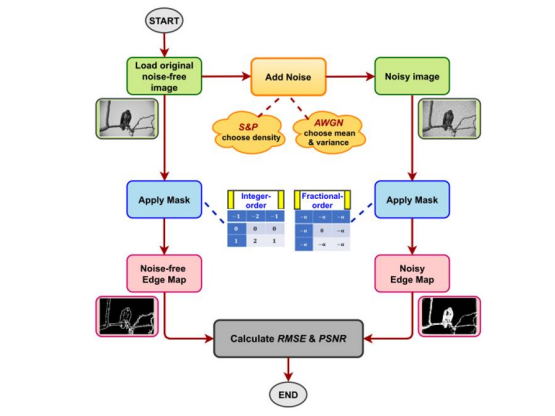
Fractional-order edge detection masks for diabetic retinopathy diagnosis as a case study
Edge detection is one of the main steps in the image processing field, especially in bio-medical imaging, to diagnose a disease or trace its progress. The transfer of medical images makes them more susceptible to quality degradation due to any imposed noise. Hence, the protection of this data against noise is a persistent need. The efficiency of fractional-order filters to detect fine details and their high noise robustness, unlike the integer-order filters, it renders them an attractive solution for biomedical edge detection. In this work, two novel central fractional-order masks are proposed
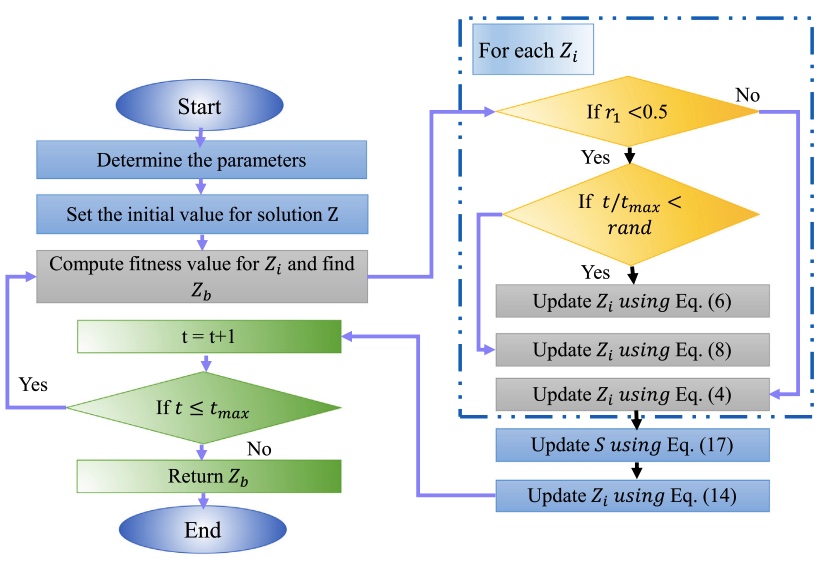
A Grunwald–Letnikov based Manta ray foraging optimizer for global optimization and image segmentation
This paper presents a modified version of Manta ray foraging optimizer (MRFO) algorithm to deal with global optimization and multilevel image segmentation problems. MRFO is a meta-heuristic technique that simulates the behaviors of manta rays to find the food. MRFO established its ability to find a suitable solution for a variant of optimization problems. However, by analyzing its behaviors during the optimization process, it is observed that its exploitation ability is less than exploration ability, which makes MRFO more sensitive to attractive to a local point. Therefore, we enhanced MRFO by
Control design approaches for parallel robot manipulators: A review
In this article, different control design approaches for parallel robot manipulators are presented with two distinguished classes of control strategies in the literature. These are the model-free control and the dynamic control strategy, which is mainly a model-based scheme, and is mostly the alternative when the control requirements are more stringent. The authors strongly believe that this paper will be helpful for researchers and engineers in the field of robotic systems. Copyright 2017 Inderscience Enterprises Ltd.
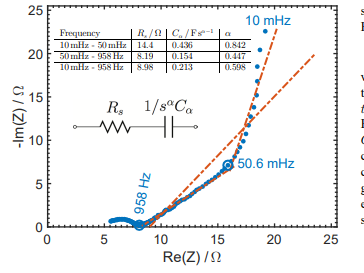
Further experimental evidence of the fractional-order energy equation in supercapacitors
Due to the dispersive porous nature of its material, carbon–carbon supercapacitors have a current–voltage relationship which is modeled by a fractional-order differential equation of the form i(t)=Cα[Formula presented] where α≤1 is a dispersion coefficient and Cα is a pseudo-capacitance not measurable in Farads. Hence, the energy stored in a capacitor, known to equal CV2/2 where C is the capacitance in Farad and V is the voltage applied, does not apply to a supercapacitor. In a recent work (Allagui et al., 2016), a fractional-order energy equation that enables the quantification of the energy
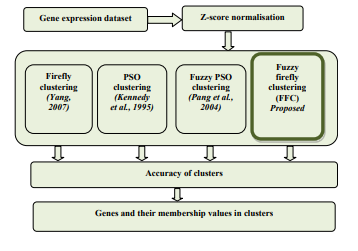
Fuzzy firefly clustering for tumour and cancer analysis
Swarm intelligence represents a meta-heuristic approach to solve a wide variety of problems. Searching for similar patterns of genes is becoming very essential to predict the expression of genes under various conditions. Firefly clustering inspired by the behaviour of fireflies helps in grouping genes that behave alike. Contrasting hard clustering methodology, fuzzy clustering assigns membership values for every gene and predicts the possibility of belonging to every cluster. To distinguish highly expressed and suppressed genes, the research in this paper proposes an efficient fuzzy-firefly
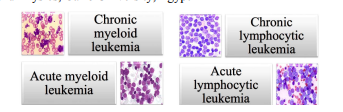
Fractional-order mathematical model for Chronic Myeloid Leukaemia
This paper is dedicated to develop a fractional order model of the rate of change of cancerous blood cells in Chronic Myeloid Leukaemia using fractional-order differential equations as well as tackling the factors that affect this rate and compare between them. The simulated cases (using MATLAB) prove that the proposed model is doable in terms of the variables positions in the equations and its effect on the overall population. Also, the effect of the Pactional order is investigated through three parameters sets and it has shown strong influence on the dynamic response. © 2017 IEEE.