


Artificial Intelligence
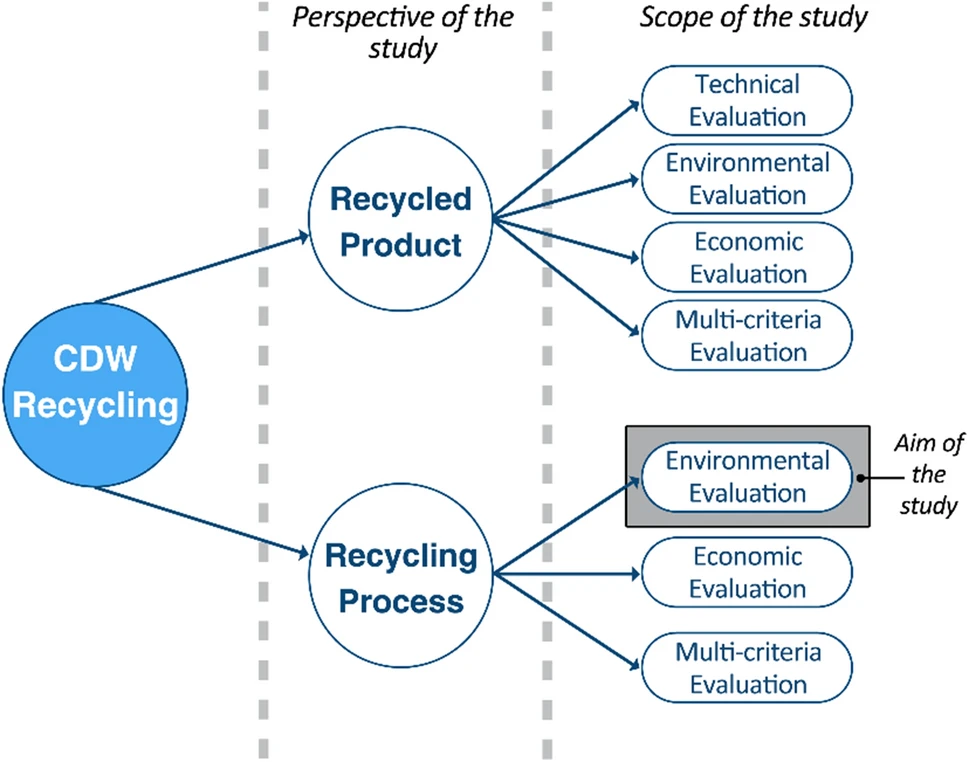
Environmental feasibility of recycling construction and demolition waste
Construction, demolition, and renovation activities generate a significant amount of waste, posing serious environmental risks. The scarcity of recycling facilities makes it difficult to implement the new legislation, which calls for producing recycled aggregates. Moreover, the lack of studies on the environmental feasibility of recycling construction and demolition waste in regions with plentiful natural resources of aggregates is a contributing factor to this scarcity. Therefore, this paper studies the environmental feasibility of establishing a construction and demolition waste (CDW)
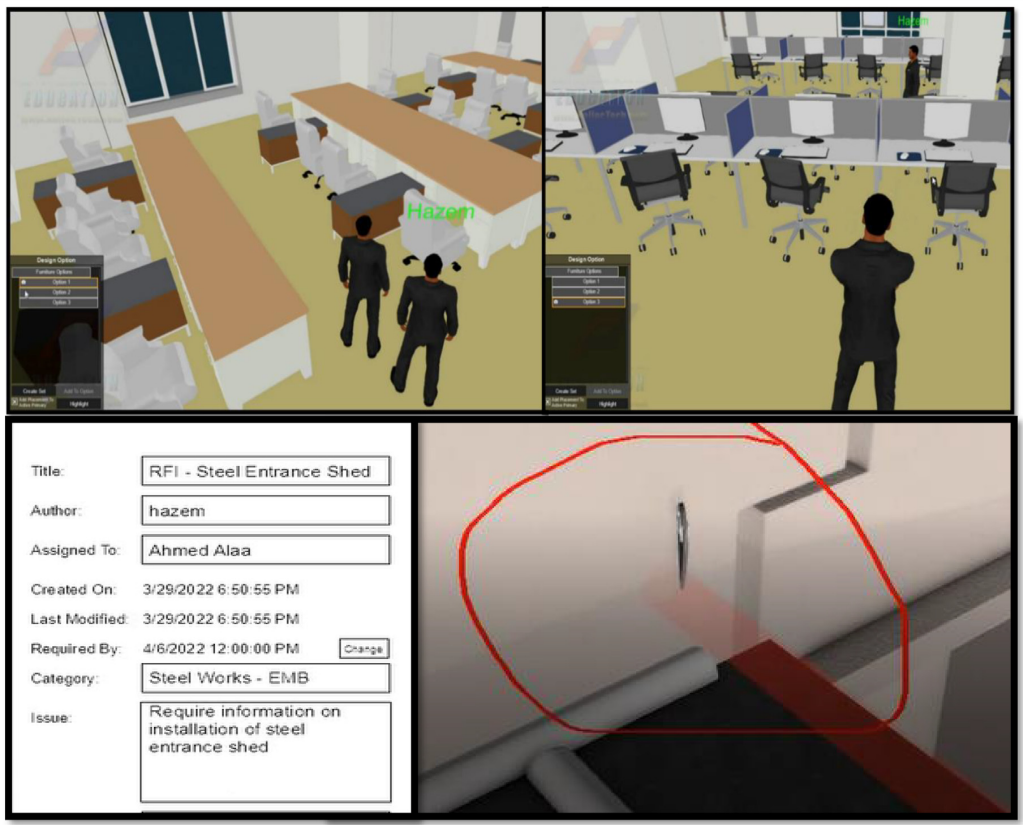
Impact assessment of implementing virtual reality in the Egyptian construction industry
Construction projects in Egypt are becoming more complex as the need for mega projects increases to meet the Egyptian 2030 vision. Meanwhile, the advancement of Virtual Reality technologies is apparent in the 21st century. This paper aims to assess the impact of implementing virtual reality in the Egyptian construction industry. An application using Fuzor VDC and Oculus Quest 2 has been developed elaborating the technology's use. The application includes 4D simulation and meetings in virtual reality. Furthermore, a survey is conducted to measure the impact of implementation on key project
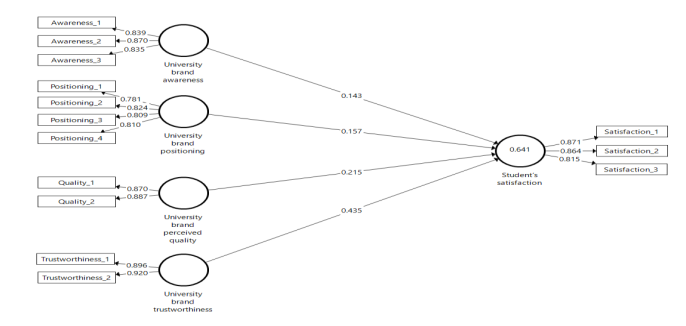
The Psychological Impact of University Brand Equity Using Firm Generated EWOM on Students’ Satisfaction: The Moderating Effect of Gender
This study uses firm-generated "electronic word of mouth (eWOM)" and students' satisfaction to analyse the effect of university brand equity. Four aspects of brand equity—"awareness, positioning, perceived quality, and trustworthiness"—are examined by the conceptual framework. It also examines how gender influences the relationship between student satisfaction and institution brand equity. At Nile University in Cairo, Egypt, the study used an exploratory survey methodology with a sample of 295 students from its four schools of "business administration, computer science, engineering, and
Organizational learning via gamification for employer brand management
Purpose: This paper aims to deepen our understanding of how serious games could be used for learning in organizations to empower brand performance and image sustaining competitive advantage from a Resource Based View (RBV) perspective and to examine the practical implications of the evolving technologies for employers. Design/methodology/approach: The research methodology is based on a qualitative approach adopting the case study research method (Yin, 2003). Data were collected through fifteen semi-structured interviews (a total of twelve hours) with the involved departments (particularly
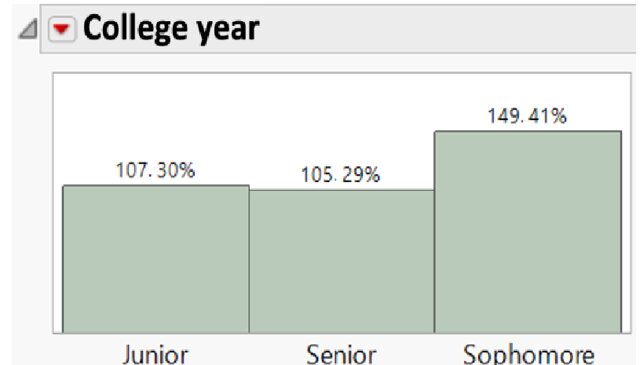
Impact of working while studying on university students’ academic performance in Egypt during the COVID-19 pandemic and transition to online learning
In the context of online education, which has been growing as a common approach, this paper examines the impact of working while studying on university students’ academic performance, namely Cumulative GPA (CGPA), as a rising trend in Egypt, especially after the pandemic and the shift into online learning. The research followed an exploratory survey method, namely a quantitative approach, with a sample of 361 students randomly selected using the convenience sampling method from a total of 3326 students, both working and non-working, from years 2 to 4 across the four schools at Nile University
A Proposed Nonlinear Programming Optimization Model for Optimal Budget Mix of Digital Marketing Campaigns
This paper proposes a nonlinear mathematical model to address the problem of optimizing budget allocation within digital marketing campaigns. The model provides marketers with a systematic quantitative framework for effective budget allocation across various platforms. The model seeks to identify the optimal budget mix that maximizes the expected net impressions using the Sainsbury Normal Method (SNM). The proposed model considers multiple constraints, such as budget limitations and advertiser's preferences. Results demonstrate the applicability of the model through hypothetical two case
Scenario Analysis for Supply Chain Management of Milled Grain Products in South Africa: A System Dynamics Approach
This study aimed to identify the interactions between the sub-systems of the supply chain system of milled grain products, in South Africa, namely: (1) farming (agricultural); (2) transport (transportation); (3) manufacturing (milling); and (4) trade (retail). Furthermore, this paper investigated how these sub-systems are affected by economic and natural external factors namely: (1) the exchange rate between ZAR and USD; (2) the price of international crude oil; and (3) climate change and/or droughts. For this purpose, system dynamics (SD) model was developed and used, which enabled to
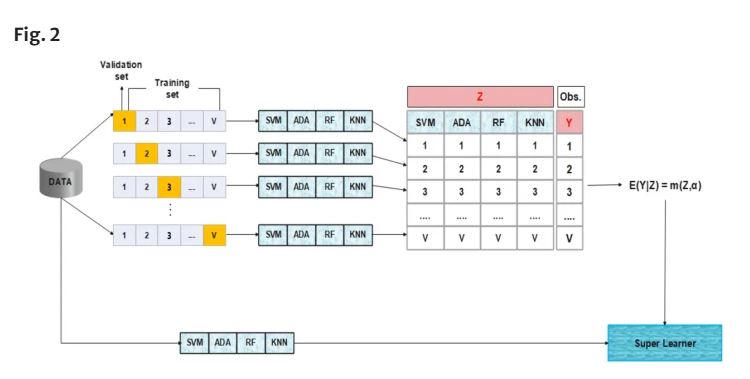
Measuring the efficiency of banks using high-performance ensemble technique
The importance of technology and managerial risk management in banks has increased due to the financial crisis. Banks are the most affected since there are so many of them with poor financial standing. Due to this problem, an unstable and inefficient financial system causes economic stagnation in both the banking sector and overall economy. Data envelopment analysis (DEA) has been used to examine decision-making units (DMUs) performance to enhance efficiency. Currently, with the rapid growth of big data, adding more DMUs will likely require a large amount of memory and CPU time on the computer
Adsorption as an Emerging Technology and Its New Advances of Eco-Friendly Characteristics: Isotherm, Kinetic, and Thermodynamic Analysis
Water contamination with paints causes a colour agent to the water that negatively affects the environment, organisms, and humans. Different physicochemical processes are applied for wastewater treatment; however, they have many drawbacks such as high cost, generating toxic waste, and non-effective at low concentrations. Adsorption is considered a promising technique for pollutant removal from polluted wastewater. Commercial activated carbon, nano-materials, and natural biological materials are used as adsorbents in adsorption. This chapter focuses on discussing the adsorption process, the
Water Importance and Pollution Sources-Recommended Limits of Pollutants
There are many water resources like rivers, seas, rains, and groundwater, which can be used in different sectors such as agricultural, domestic, and industrial uses. Therefore, different wastewater effluents with different properties are produced depending on their source. Industrial wastewater is one of the most harmful effluents due to the presence of toxic pollutants such as heavy metals, dyes, and other toxic substances. Usually, water is used in different industries for different internal processes, and then the resulting wastewater is discharged without treatment into the water resources