


Conference Paper
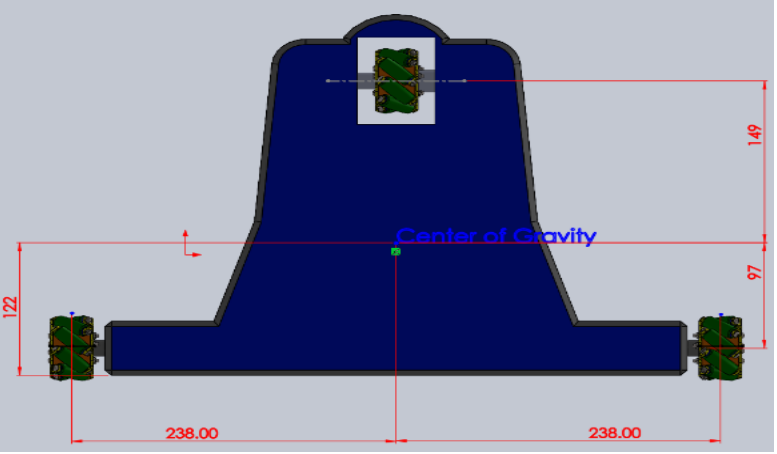
A Novel Design of a T-Model Three Mecanum Wheeled Mobile Robot
Omnidirectional mobile robots are considered for many research applications due to their maneuverability in tight spaces and smoothness of motion. This paper presents a novel design of a T-model mecanum wheeled mobile robot (3-MWMR), the derivation of the inverse and forward kinematics model of the proposed robot, the physical body design of the proposed T-model shape, the simulation of the system dynamics and omnidirectional capabilities of the robot on CoppeliaSim V-rep and MATLAB. The experimental results obtained validates the proof of concept of the proposed model for reduced power losses, reduced weight symmetrical design and suitability in narrow spaces with many right angles. © 2022 IEEE.
Related Publications

Journal
Hands-on analysis of using large language models for the auto evaluation of programming assignments
Journal

