


Artificial Intelligence
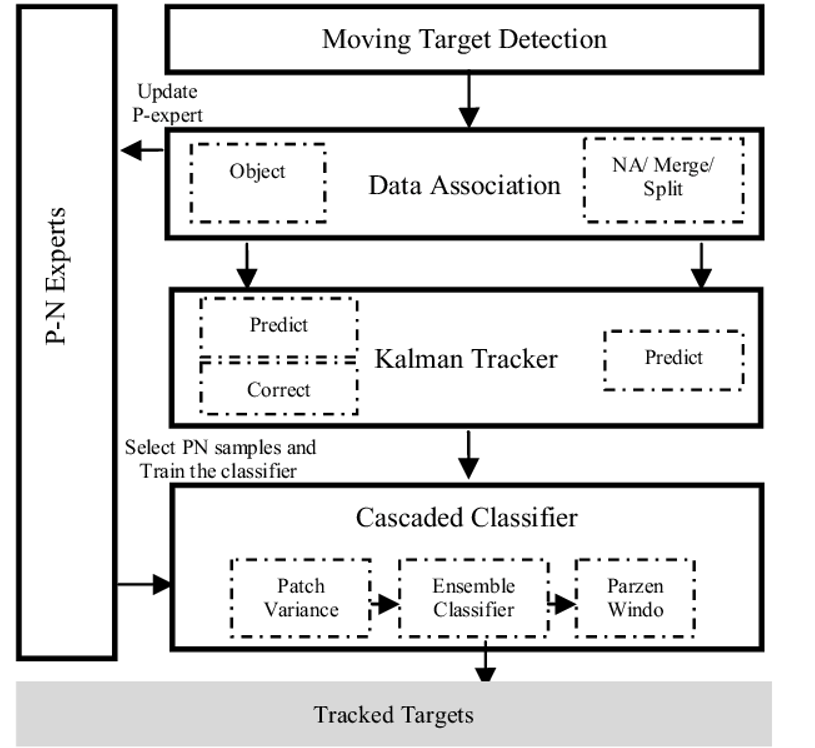
Enhanced target tracking in UAV imagery with P-N learning and structural constraints
This paper presents improved automatic moving target detection and tracking framework that is suitable for UAV imagery. The framework is comprised of motion compensation phase to detect moving targets from a moving camera, target state estimation with Kalman filter, and overlap-rate-based data association. Finally, P-N learning is used to maintain target appearance by utilizing novel structural constraints to select positive and negative samples, where data association decisions are used as positive (P) constraints. After learning target appearance, a cascaded classifier is employed to detect

Using the sadakane compressed suffix tree to solve the all-pairs suffix-prefix problem
The all-pairs suffix-prefix matching problem is a basic problem in string processing. It has an application in the de novo genome assembly task, which is one of the major bioinformatics problems. Due to the large size of the input data, it is crucial to use fast and space efficient solutions. In this paper, we present a space-economical solution to this problem using the generalized Sadakane compressed suffix tree. Furthermore, we present a parallel algorithm to provide more speed for shared memory computers. Our sequential and parallel algorithms are optimized by exploiting features of the
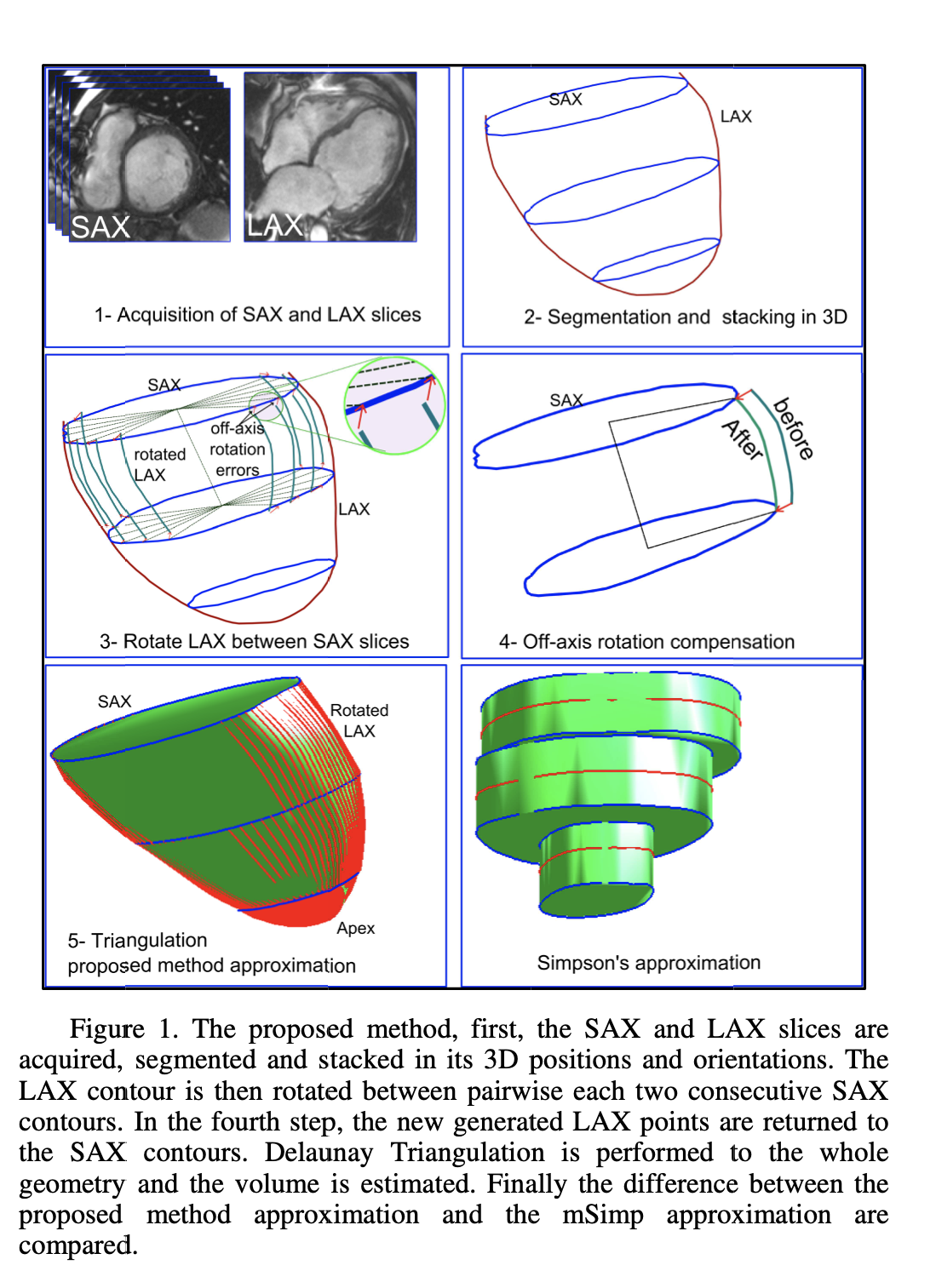
Accurate estimation of the myocardium global function from reduced magnetic resonance image acquisitions
Evaluating the heart global function from magnetic resonance images is based on estimating a number of functional parameters such as the left ventricular (LV) volume, LV mass, ejection fraction, and stroke volume. Estimating these parameters requires accurate calculation of the volumes enclosed by the inner and outer surfaces of the LV chamber at the max contraction and relaxation states of the heart. Currently, this is achieved through acquisition and segmentation of a large number of short-axis (SAX) views of the LV, which is time-consuming and expensive. Reducing the number of acquisitions
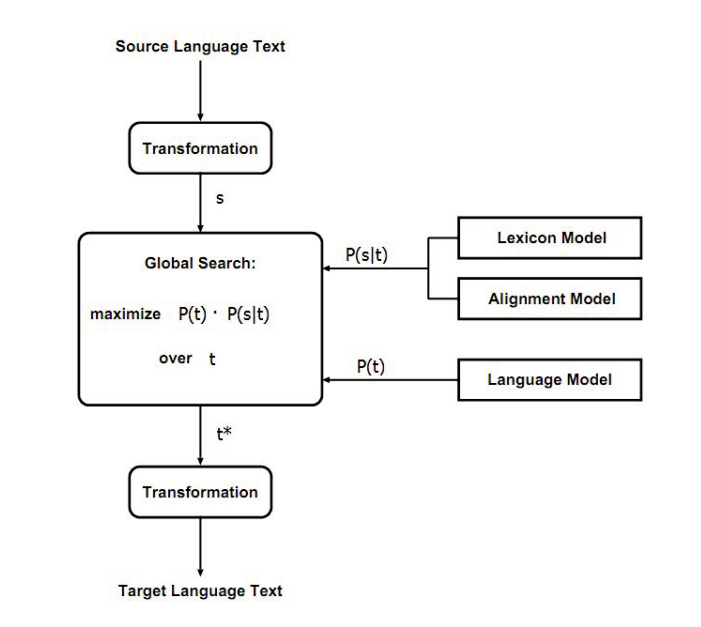
English-Arabic statistical machine translation: State of the art
This paper presents state of the art of the statistical methods that enhance English to Arabic (En-Ar) Machine Translation (MT). First, the paper introduces a brief history of the machine translation by clarifying the obstacles it faced; as exploring the history shows that research can develop new ideas. Second, the paper discusses the Statistical Machine Translation (SMT) method as an effective state of the art in the MT field. Moreover, it presents the SMT pipeline in brief and explores the En-Ar MT enhancements that have been applied by processing both sides of the parallel corpus before
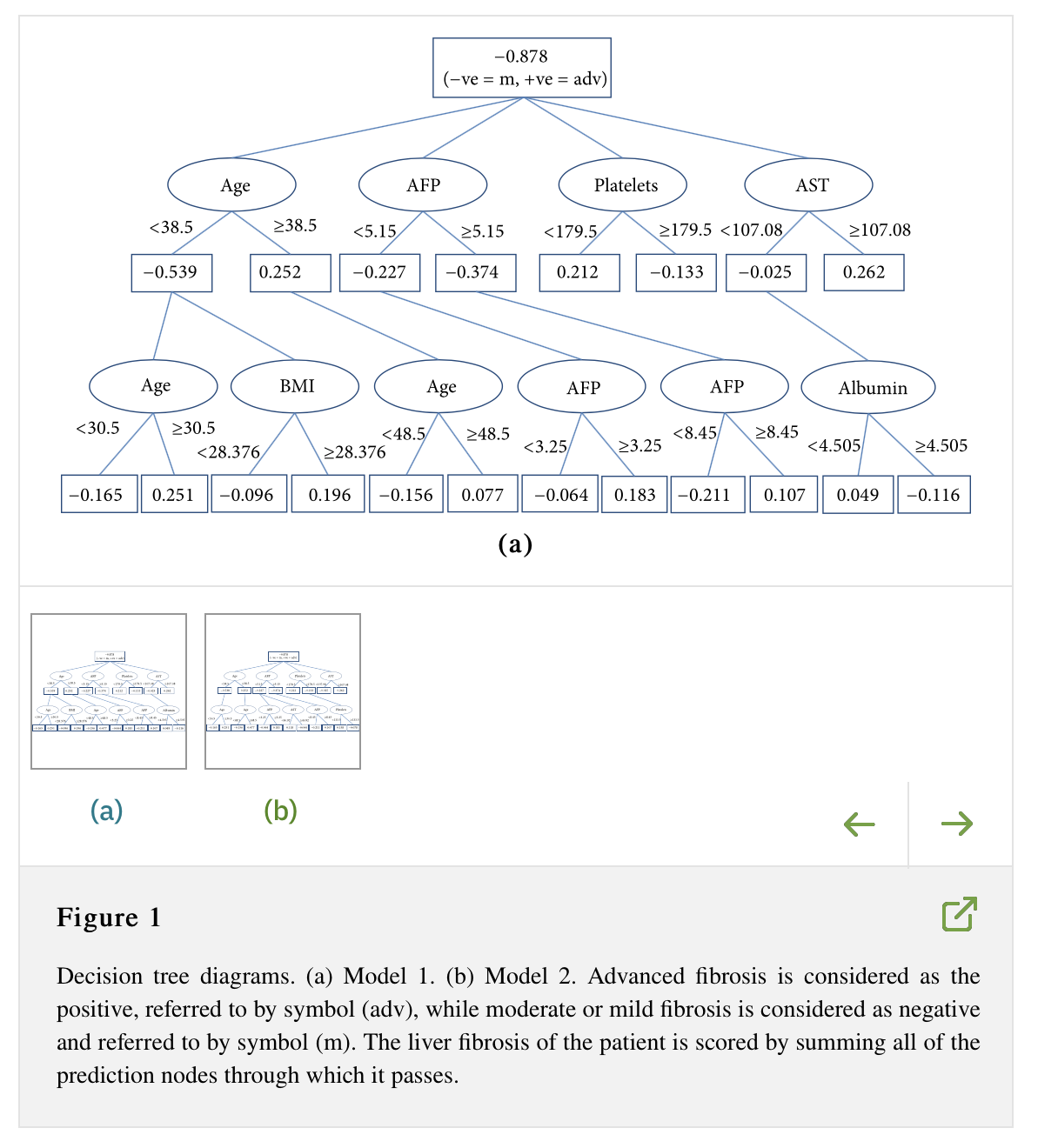
Accurate Prediction of Advanced Liver Fibrosis Using the Decision Tree Learning Algorithm in Chronic Hepatitis C Egyptian Patients
Background/Aim. Respectively with the prevalence of chronic hepatitis C in the world, using noninvasive methods as an alternative method in staging chronic liver diseases for avoiding the drawbacks of biopsy is significantly increasing. The aim of this study is to combine the serum biomarkers and clinical information to develop a classification model that can predict advanced liver fibrosis. Methods. 39,567 patients with chronic hepatitis C were included and randomly divided into two separate sets. Liver fibrosis was assessed via METAVIR score; patients were categorized as mild to moderate (F0
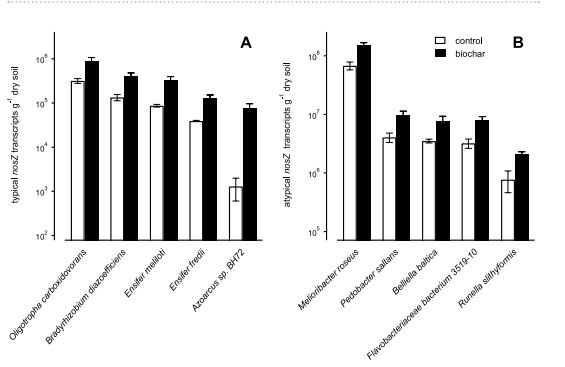
Soil biochar amendment affects the diversity of nosZ transcripts: Implications for N2O formation
Microbial nitrogen transformation processes such as denitrification represent major sources of the potent greenhouse gas nitrous oxide (N2O). Soil biochar amendment has been shown to significantly decrease N2O emissions in various soils. However, the effect of biochar on the structure and function of microbial communities that actively perform nitrogen redox transformations has not been studied in detail yet. To analyse the community composition of actively denitrifying and N2O-reducing microbial communities, we collected RNA samples at different time points from a soil microcosm experiment
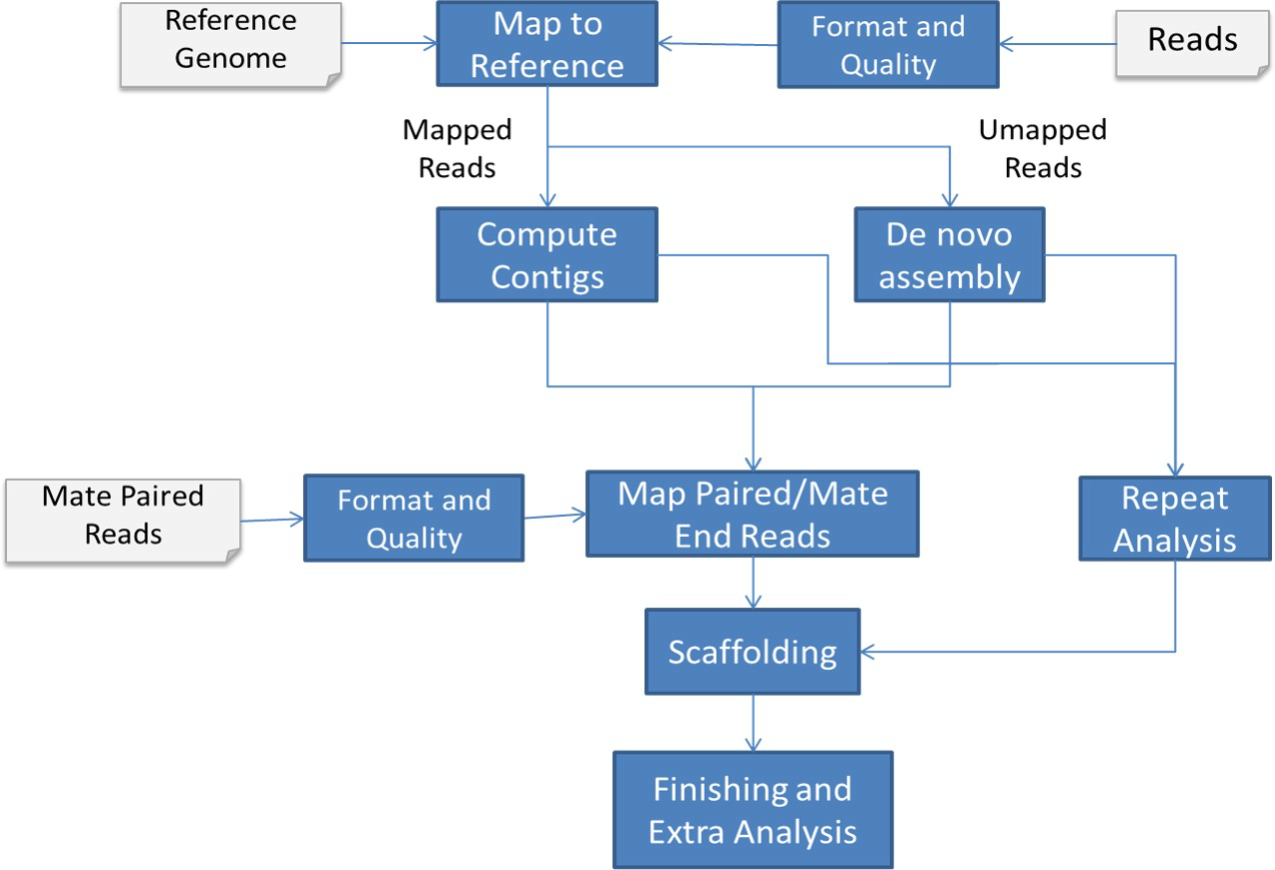
Sequencing and assembly of the Egyptian buffalo genome
Water buffalo (Bubalus bubalis) is an important source of meat and milk in countries with relatively warm weather. Compared to the cattle genome, a little has been done to reveal its genome structure and genomic traits. This is due to the complications stemming from the large genome size, the complexity of the genome, and the high repetitive content. In this paper, we introduce a high-quality draft assembly of the Egyptian water buffalo genome. The Egyptian breed is used as a dual purpose animal (milk/meat). It is distinguished by its adaptability to the local environment, quality of feed
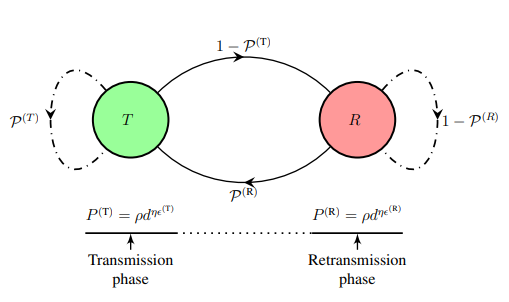
On the effect of uplink power control on temporal retransmission diversity
Using stochastic geometry, this letter studies the retransmission performance in uplink cellular networks with fractional path-loss inversion power control (FPC). We first show that the signal-to-interference-ratio (SIR) is correlated across time, which imposes temporal diversity loss in the retransmission performance. In particular, FPC with lower path-loss compensation factor decreases inter-cell interference but suffers from degraded retransmission diversity. On the other hand, full path-loss inversion achieves almost full temporal diversity (i.e., temporal SIR independence) at the expense
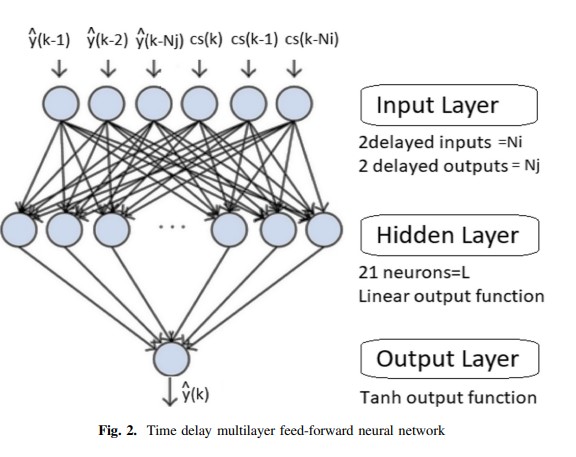
Performance Evaluation of Research Reactors Under Different Predictive Controllers
This paper is concerned with the evaluation of nuclear research reactor under two types of predictive controllers. The first one is Receding Horizon Predictive Controller (RHPC) which is considered a simple linear predictive controller. The other one is Neural Network Predictive Controller (NNPC) which is a type of nonlinear predictive controller. These controllers are applied over multi-point reactor core model. This model takes into consideration the nonlinearity of the reactor. It also takes into consideration some important physical phenomena like temperature effect, time variant fuel
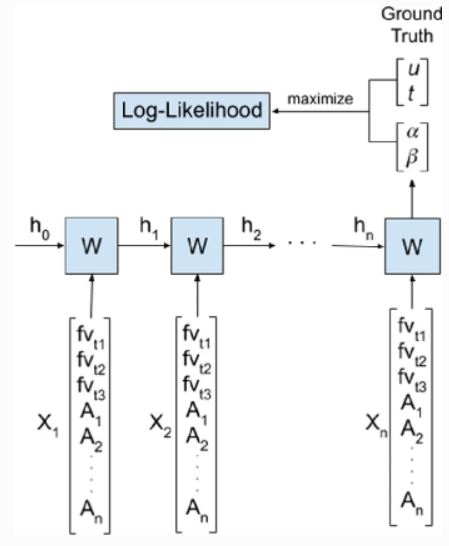
Predicting Remaining Cycle Time from Ongoing Cases: A Survival Analysis-Based Approach
Predicting the remaining cycle time of running cases is one important use case of predictive process monitoring. Different approaches that learn from event logs, e.g., relying on an existing representation of the process or leveraging machine learning approaches, have been proposed in literature to tackle this problem. Machine learning-based techniques have shown superiority over other techniques with respect to the accuracy of the prediction as well as freedom from knowledge about the underlying process models generating the logs. However, all proposed approaches learn from complete traces