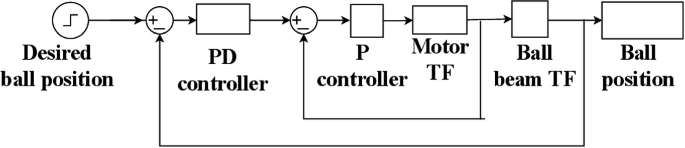
Optimal PD-PD and State Feedback Control of Underactuated Ball and Beam System with Uncertainty and Disturbances
This research paper investigates the optimal control of the ball and beam system, a challenging fourth-degree system that is commonly used in control studies. Four different control techniques, namely cascaded PD-P, cascaded PD-PD, optimized cascaded PD-PD control using a genetic algorithm, and state feedback control, are compared in terms of their performance. The study aims to achieve specific design criteria, including low rise time, less than three percent overshoot, and less than two seconds of settling time. In addition, the impact of disturbances, uncertainty, control action, and beam angle on the robustness of the system is also examined. MATLAB software is employed to implement and evaluate the performance of the different control methods. The findings contribute to the understanding of how to achieve optimal control of complex systems like the ball and beam system. © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024.
Related Publications

Hands-on analysis of using large language models for the auto evaluation of programming assignments