


Conference Paper
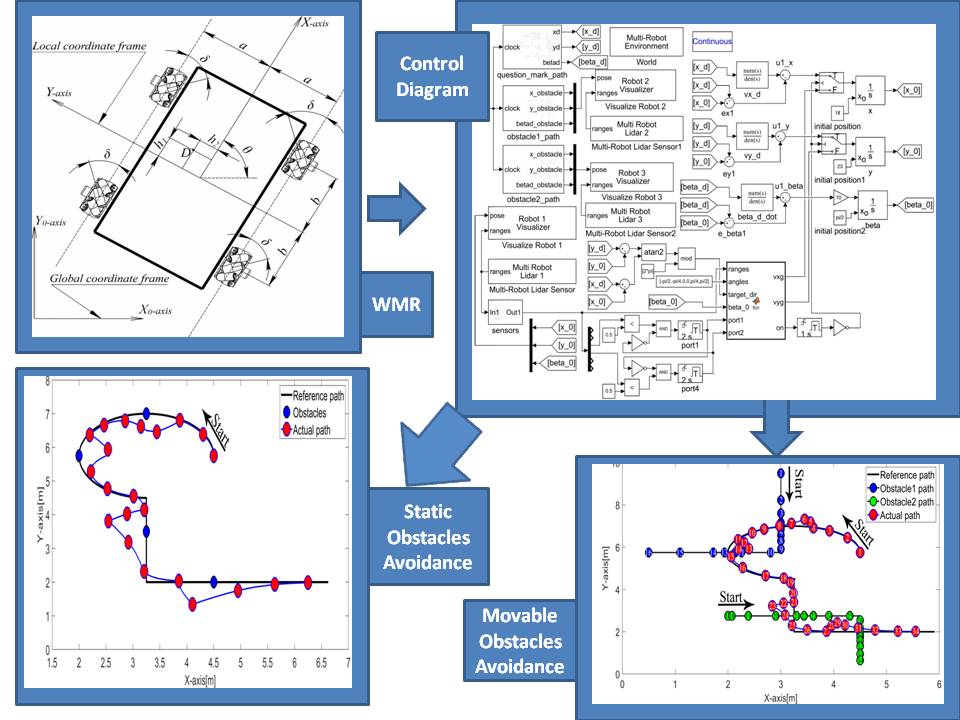
The Implementation of Fuzzy logic controller for the obstacle avoidance in 3 Mecanum-wheeled Robot
mobile robots play an enormous role in different fields of daily life applications including military, safety, and logistic multi-tasking capabilities. A new approach is introduced to the market which is the 3 Mecanum wheeled mobile robot (3-MWMR) is being tested and validated. The main goal of the proposed design is to achieve all the desired directions of motion and to improve the performance of the mobile robot in avoiding obstacles using the fuzzy logic controller. © 2022 IEEE.
Related Publications

Journal
Hands-on analysis of using large language models for the auto evaluation of programming assignments
Journal

