


Publications
Publications
Filter by
Analysis of compressive strength of glass fiber reinforced concrete using design of experiments
Although there are many studies on Fiber Reinforced Concrete (FRC), determining the factors having the highest impact on compressive strength of fiber reinforced concrete has little attention. In this paper a full factorial L16OA design is used to analyze the early compressive strength of Glass Fiber Reinforced Concrete (GFRC). This is to find the factors tat are significantly affecting the early
Wireless Optogenetics Visual Cortical Prosthesis Control System
This research paper presents the wireless data and power transfer system for optogenetics visual cortical prosthesis. The system uses the inductive coupling power transfer and 2.4GHz Bluetooth 4.0 data transfer. This system contains two hardware parts: the external headset consists of power and data transmitters, image capture, and image processing units; the subcutaneous implant PCB consists of
Medical Image Compression Based on Region of Interest
Medical images show a great interest since it is needed in various medical applications. In order to decrease the size of medical images which are needed to be transmitted in a faster way; Region of Interest (ROI) and hybrid lossless compression techniques are applied on medical images to be compressed without losing important data. In this paper, a proposed model will be presented and assessed
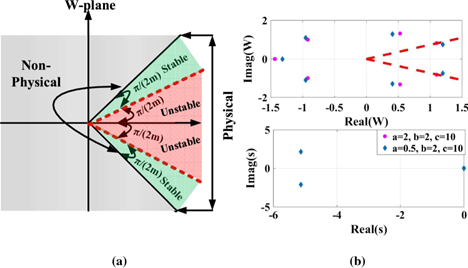
Correction to: Stability analysis of fractional-order Colpitts oscillators (Analog Integrated Circuits and Signal Processing, (2019), 101, 2, (267-279), 10.1007/s10470-019-01501-2)
Unfortunately, in the original version of the article some typos occurred. The typos have been corrected with this erratum. Below are the corrections:(Formula presented.). © 2019, Springer Science+Business Media, LLC, part of Springer Nature.

A hybrid bat algorithm to solve the capacitated vehicle routing problem
The vehicle routing problem (VRP) is one of the important problems that has been examined extensively over the past decades. The problem holds a central position within the fields of transportation logistics and supply chain management. Due to the NP-hard nature of the problem, many researchers have developed several heuristics and metaheuristics to solve the problem. This research proposes a
Analysis of musculoskeletal disorders in personal care industries in Egypt
The increase in the complexity of operations in personal care industries in Egypt forced the ergonomic experts to propose various tools to analyze the human errors and eliminate the most dangerous operations according to the international standards of safety and ergonomics. International references such as the Rapid Upper Limb Assessment (RULA) and Rapid Entire Body Assessment (REBA) analysis are
Technological innovation in ergonomics & safety in automotive industries in Egypt
The increase in the complexity and the inspiring environment between the automotive organizations in Egypt forced the quality experts and management team to propose various tools related to Quality Management Systems but there is a slight apprehension to the ergonomic concepts in these industries. This study investigates the complications related to the ergonomics in the assembly line of an
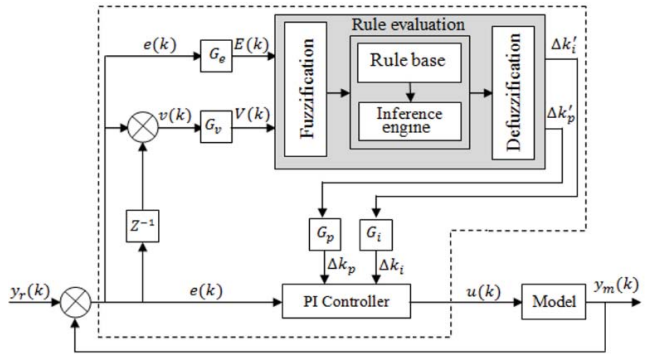
Fuzzy-supervised pi for flow-control process, design and experimental validation
This paper is dedicated to design a fuzzy-supervised PI controller. It is a is a two-level controller, the lower-level controller (LLC) containing the classical PI controller and the upper-level controller (ULC) is a supervisory fuzzy logic controller (FLC). In real time, the ULC modifies, automatically, the parameters of the LLC which, consequently, drive the process to the desired status. The
Thermal optimization of square pin-fins in crossflow using the Lattice Boltzmann Method with quadratic thermal equilibrium
The geometric spacing and operating Reynolds number (Re) for the best thermal performance of square pin-fin heat sinks is found numerically at a Prandtl number of 0.7. The numerical model used is the double population thermal Multiple-Relaxation-Time Lattice Boltzmann Method (MRT LBM). The Nusselt number (Nu), friction factor (f) and the Thermal Performance Factor (TPF) are calculated for a range
Design and Numerical Analysis of an Open-Circuit Low-Speed Wind Tunnel
The design and numerical analysis of a 3D open-circuit, low-speed, with a maximum velocity of 20 m/s in the test section, wind tunnel is presented. Two diffusers' angels are numerically tested in order to reduce the pumping power of the fan. The proposed design is analyzed using three-dimensional, turbulent, incompressible flow using ANSYS FLUENT. Numerical results show that the velocity as well